Students: Alex van de Vliert, Berend-Jan Slobbe & Mick Remmerswaal
Introduction
DTC is a highly specialized manufacturer of structural parts for aerostructures. Since the creation of the company in 1998, DTC has been making all its parts exclusively from thermoplastic composites. The first flying parts for aircraft that DTC manufactured where the landingflap ribs of the Dornier 328 jet. Today they manufacture more than 2.000 unique parts for 12 different types of large passenger aircraft and business jets . Parts are manufactured at their 5.000 m2 factory in Almere the Netherlands and exported worldwide.
Assignment
The problem DTC has is that the unidirectional thermoplastic tape is being cut into different shapes and sizes, these parts need to be sorted. Thus our assignment was the design and implementation of a proof of concept capable of sorting a large amount of unique parts, in different shapes and sizes.
Solution
The first visit to DTC was meant for orientation around their current setup. This setup consists of a large conveyer with a cutting machine on top of it. This cutting machine cuts the plastic in smaller parts, these parts are visualised on a beamer hanging over the conveyer. The beamer is used for extra help so that the worker can easily distinguish what parts are lying where. DTC wanted to integrate this machine in our setup. This came with a big problem.
This was that we could not actually use the machine they wanted us to use. Because this would mean a lot of downtime for their machine, while we were implementing our solution. Also we could not use their space as a robot lab as we needed to construct our solution in our own robot lab. Our solution for this problem is that we simulated the cutting machine, we have done this by creating a small setup using a laptop, Raspberry Pi, rotary encoder and a beamer.
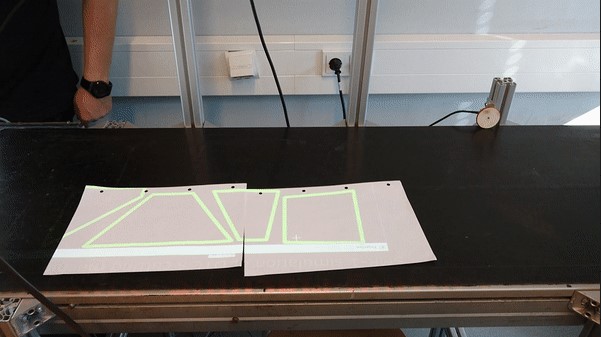
The rotary encoder sends its pulses to the Raspberry Pi, using the input pins of the Raspberry Pi. The Raspberry Pi uses these pulses to calculate how fast the conveyer is moving, this in turn is sent to the laptop. The laptop uses files, special constructed and sent by the company to us, to project via the beamer the image on the conveyer. Using the speed from the Raspberry Pi it moves the image along.
To actually move the parts to a sorted place and to construct this sorted place we have used an UR-10 Cobot and a Cognex camera. With these two components we made a setup where the robot can easily pick up parts from the conveyer and move them to a box within its vicinity.

Using a vacuum suction cup we can easily pick up the different parts that are on the conveyer, the robot uses conveyer tracking to pick up the parts from a moving conveyer. This is done by using the same rotary encoder used within the simulation setup.