Students: Mees van de Lint, Job Eireiner, Iker Corpas, Ties van der Sar
Introduction
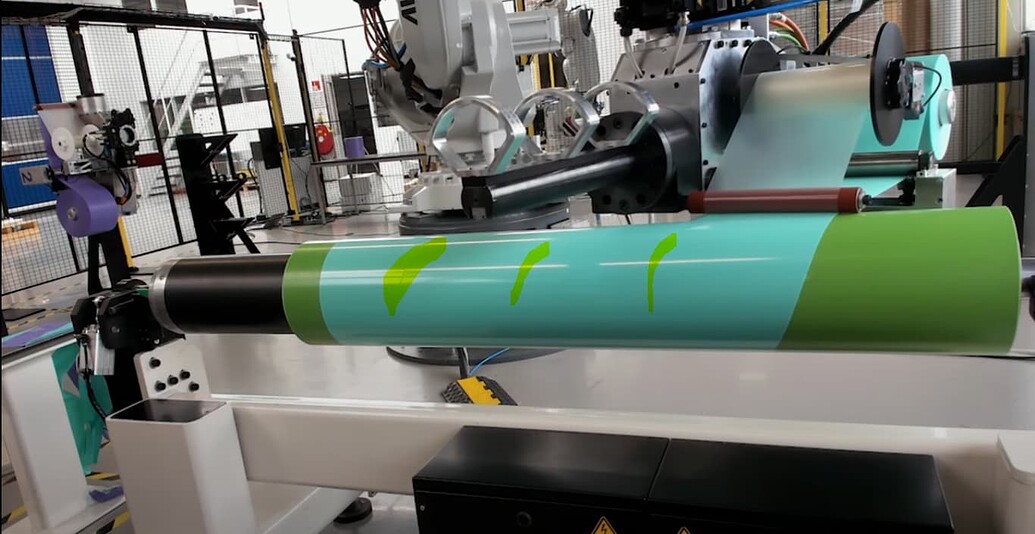
AV Flexologic is a company which designs and makes machines for the flexographic industry. They started off with a machine that can put the stamps on a taped sleeve at exactly the right position. A few years ago they also set up a robot cell which can do the picking, taping and placing of sleeves. This is where our challenge comes in: While taping the sleeve, a gap can occur between the lines of tape. When this happens and it is not checked the sleeves will get stamps applied and will be used to print. If this gap is more than 0,5mm a line on the product will be visible and the product fails.
The challenges
The biggest challenge we faced during the project was the gap detection itself. We started off thinking we needed a vision system in combination with a micro lens. To be reliable the system needs to be able to measure a gap with a precision of 0.05 millimeters.
After some trial and error we let go of the vision system and set our sight on sensors.
As for a sensors we looked at two different types:
- Array sensor
- Laser profiler
At first we tested the array sensor, the specs appeared to be on the edge of what we needed but in the end it simply wasn’t sufficient.
After the array sensor we switched to a laser profiler, these are rather costly sensors so we really had to do our research. But in the end settled for a SICK sensor. which is also being used in the final setup
Secondly we had to figure out a way to move the sensor around and after some research and speculation we settled down on a linear guide. For the movement of the carriage, the cart that’s attached to the linear guide, we used a belt drive system in combination with an ABB MU100 servo motor which can easily be configured in their robot setup.


Solutions
With the moving part fully figured out we attached it to the tape station, just in parallel with the sleeve, this way we can detect the gap in the required direction.
The servo provided the advantage that it is really easy to control with RobotStudio, the programming software that Flexologic uses for the robot.
For programming, it is quite simple, you only need to add this servo as a nex axis of the robot, and just put the position you want it to move in every robot movement. Unfortunately, at the moment we couldn’t add this servo to their controller because they didn’t have enough connectors, so we used two robot controllers (one for the taping process and the mandrill rotation and the other for the linear guide), which is not the intended way. But, we managed to synchronize it this way.
All the data of the sensor is send to a Sigmatek PLC that’s capable of reading the analog output of the sensor, then this is send to the robot controller, where the measurement, the overlap and the position of the linear guide are written in a csv file, an excel file format, that is uploaded to a local web server. In this web server you can access all the measuring files, classified by date and time, and allows the user to take a look at the measured gap, which is represented in a graph.

Results
The final result was a great success, we managed to follow the sleeve appropriately and in combination with the accuracy of the sensor we were able to measure a gap with an accuracy of approximately 0,025mm. This data is transferred to a server which has a user-friendly interface for the client to see the results of a taping for calibration and quality control during the taping process.
Integration
After finishing the project the company will keep the design that we made including the sensor, mechanical design and server. They are going to update the configuration with their robot and present it to their clients starting after the minor project is done. If the clients are interested in the product the design will go into production and will be included when the robot cell is purchased.
Acknowledgement
We would like to thank Thijs Brilleman and Matthijs van der Vegt for giving us the opportunity to work at a company with such innovations.
We also want to thank Pau Mendieta and Nicola Hinssen from AV Flexologic especially for their hospitality, support and resources during our internship at the company.
