Go Pro glider
introduction
My goal was to move a Go Pro certain distances a bit smoother than walking.
The result is not entirely what I was going for.
But I like what I have learned from it.
Things like:
- 3d designing.
- 3d printing
- soldering
- Working with continuous-servo
- working with Bluetooth module
I had no experience what so ever with hardware.
But I got a lot of help from students and teachers.
It took a lot of work but here is how it works.
Control board
I worked with the nano.
An Arduino NANO is the main part next to the servo.
Arduino contains the following simple script.
#include <SoftwareSerial.h>
#include <Servo.h>
#define SERVO_PIN 9 //PWM pin that is connected to the servo
Servo myServo; //create a servo object
SoftwareSerial MyBlue(3, 2); // RX | TX
int servoAngle = 0; //servo angle which can vary from 0 – 180
int flag;
int LED = 8;
void setup()
{
myServo.attach(SERVO_PIN); //attach the pin to the object so that we can send the signal to it
Serial.begin(9600);
MyBlue.begin(9600);
pinMode(LED, OUTPUT);
Serial.println(“Ready to connect\nDefualt password is 1234 or 000”);
}
void loop()
{
if (MyBlue.available())
flag = MyBlue.read();
if (flag == “5”)
{
myServo.write(0);
delay(200);
}
else if (flag == “4”)
{
myServo.write(106);
delay(200);
}
else if(flag == “stop”)
{
myServo.write(52);
}
else
{
myServo.write(52);
Serial.println(“stop”);
}
Serial.println(“stop”);
}
This script does the easiest thing it could do.
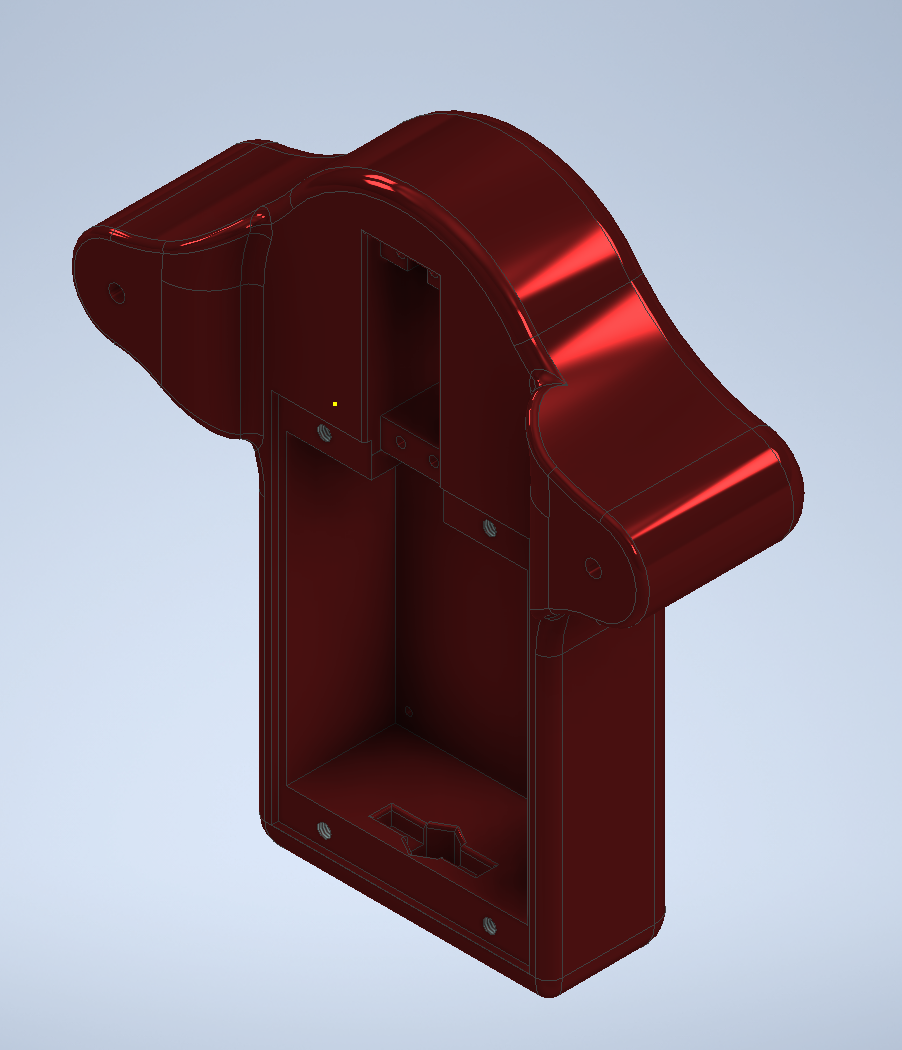
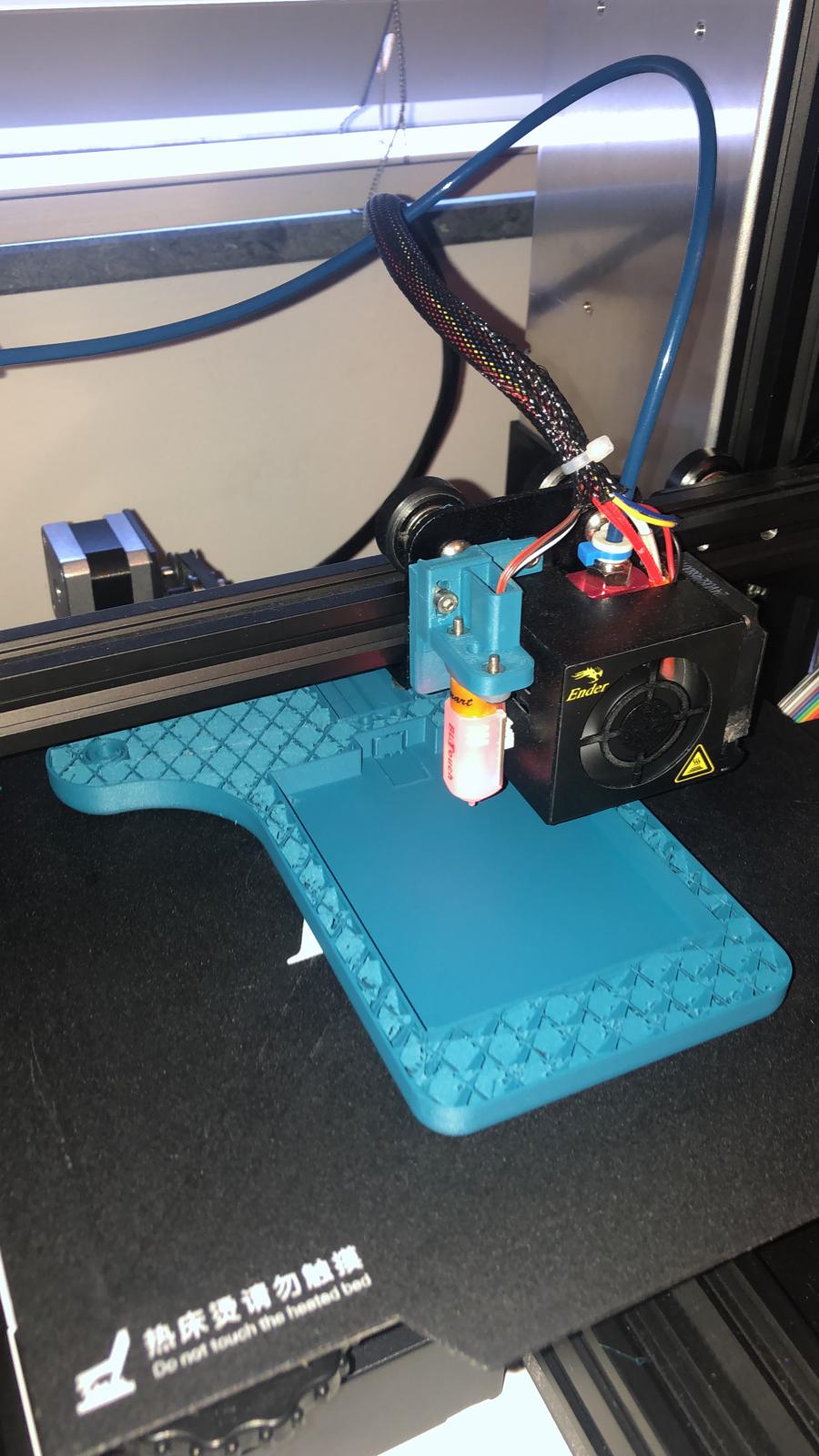
3D Printing
The 3d printing took a lot out of me.
I couldn’t have more struggles in this area,
But the result is already really nice.
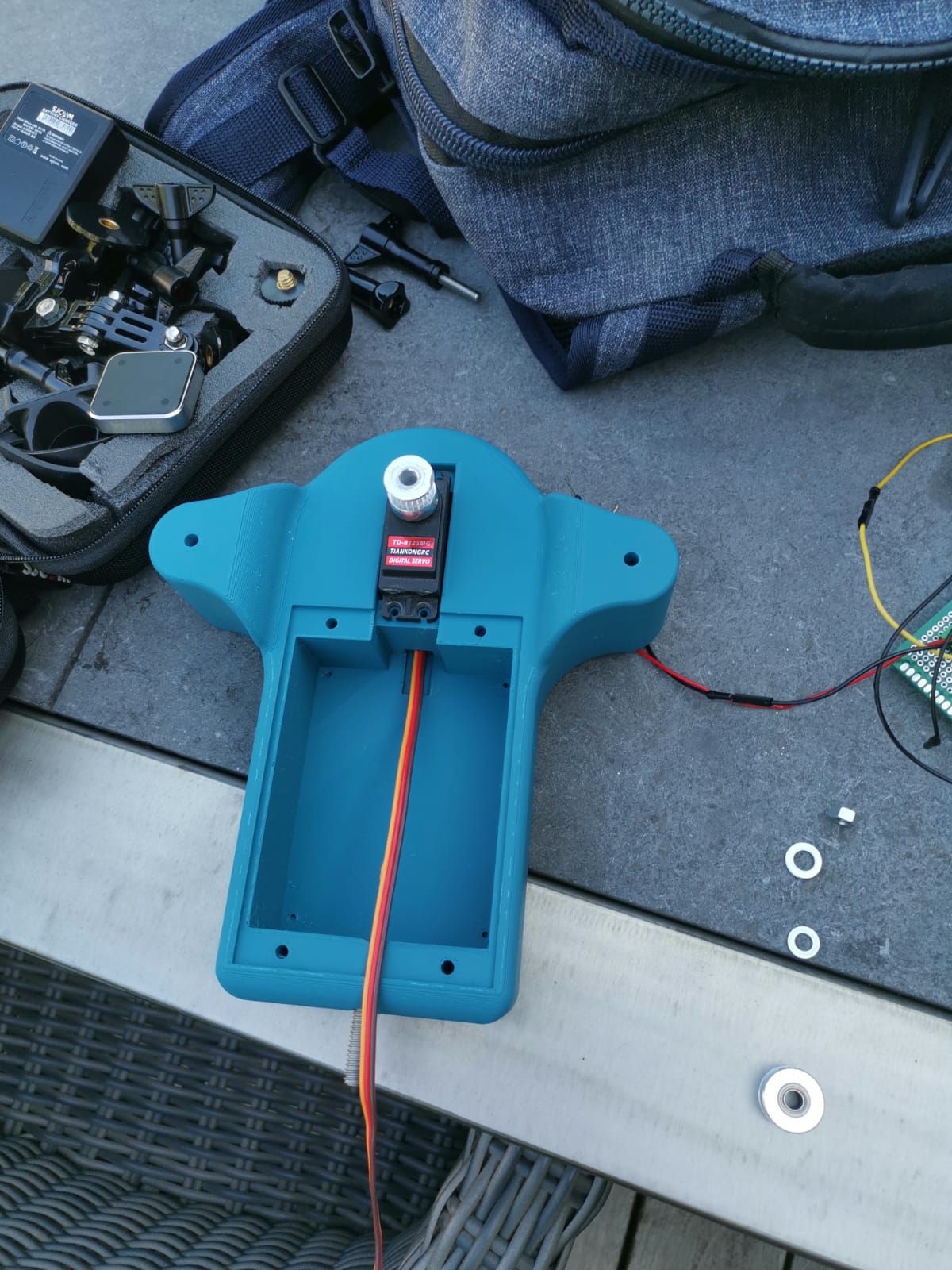
The servo
Then The servo I have is a continuous servo why a servo because it is light
weight and works effortlessly.
I also have a Bluetooth controller in use to control it from a distance.
This caused the servo to move really slow because the system needed more power.
To fix this I need to add an extra lithium ION battery.
Conclusion
I should have done many things different.
Working on your own is so difficult.
The biggest lesson I have learned is to not work alone if it is your first time in hardware.
It is too difficult.
I should have done something smaller.