Students: Jaime Cobos, Pieter van Veen, Stan Vijverberg, Manuel Vogels. (2020)
About Dry hydroponics
Dry Hydroponics produces rafts in which short-cycle crops, like lettuce, herbs, and flowers can grow. They produce an estimated amount of 750.000 products per year. Dry hydroponics is currently being run by Maurice van der Knaap and Chris Noordam in Schipluiden and the Hague.
The problem
The project is about transporting plants with roots from an unspaced raft (60×40 centimetres) to a spaced raft (120×40 centimetres).
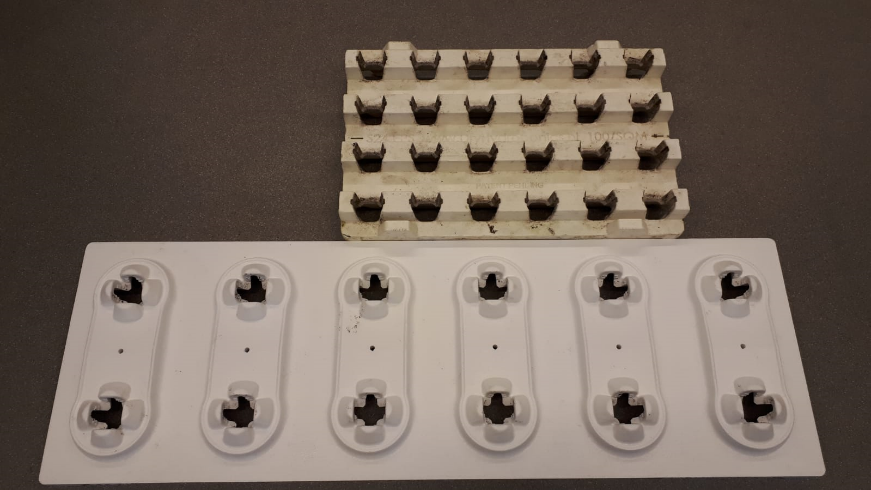
The plant roots need to correctly go through a hole on the spaced raft without being damaged or misplaced. If the roots are not placed correctly through the rafts the plants will have a high possibility of dying.
Current situation
The current situation is being done by workers. The workers carefully transport the plants with roots from one raft to another by hand. After the workers fill a spaced raft with plants the next step is placing the raft on a conveyor-belt with water.
The solution
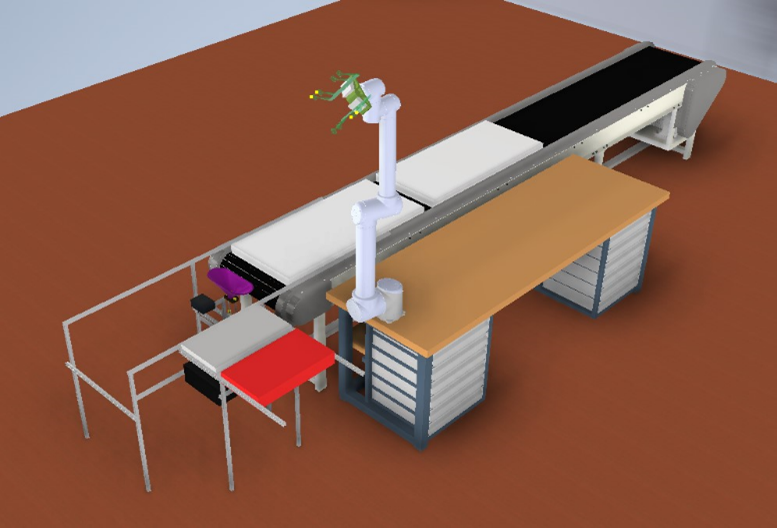
To automate the process of spacing the plants, a system has been designed around a Universal robot arm (UR-10). Empty spaced rafts are transported by a conveyor belt and plants are picked up from the unspaced rafts by the robotic arm and placed in the spaced rafts. During the placement of these plants a vacuum is created at the bottom of the raft, this vacuum ensures that the roots of the plants are guided well through the hole of the raft. After placing the plants, the roots of the plants are checked using machine vision. If no root is detected on a plant, it will be placed in another unspaced raft for further inspection. If the plants are placed in a spaced raft it will be pushed forward by the conveyor belt and the next row of the spaced raft will be available. When the unspaced raft is empty, the robot will be on standby until a new unspaced raft is manually inserted and the machine is enabled. This system can eventually transport up to 850 plants per hour.

Universal robot and end-of-arm tool
The robot end of arm tool is a key element in the automation process. They interface between the automation system and the product. Therefore, an end of arm tool was designed to hold the product without marking or damaging the plant.
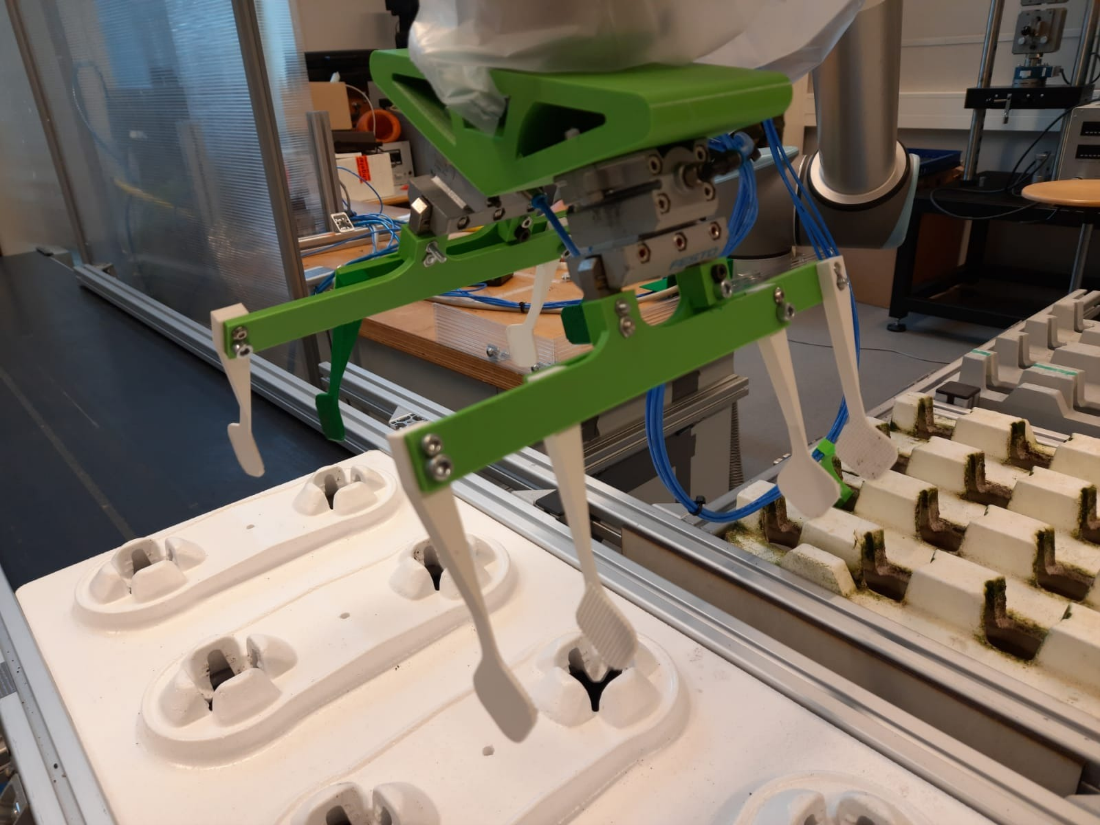
The end of arm tool can pick up to four plants. Two plants can be picked up simultaneously. The end of arm tool is attached to two pneumatic grippers. The two pneumatic grippers provide motion and actuation by introducing compressed air into the chamber of the device. This provides a simple motion of open and close for the end of arm tool. The two pneumatic grippers are then attached to a 3D-printed object which is attached to the UR-10 robot.
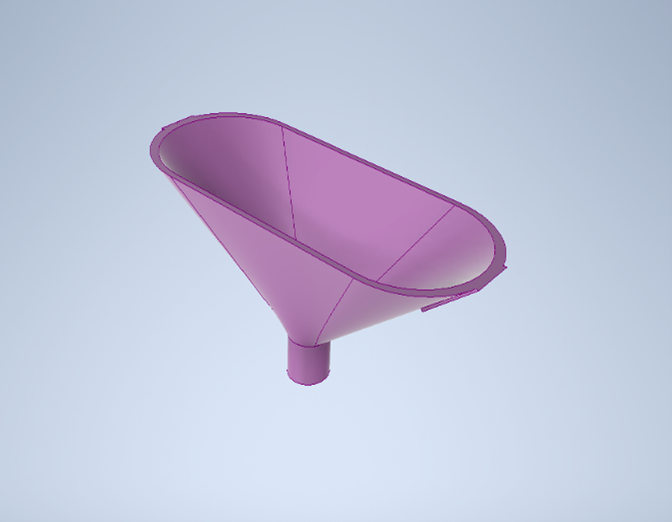
Vacuum tool
One of the main problems were the roots being damaged or misplaced when going into the raft holes. The problem was solved by creating a 3D-printed object and using a vacuum that provides an air suction which guides the plant roots unharmed through the holes. The 3D-printed object is called the vacuum tool.
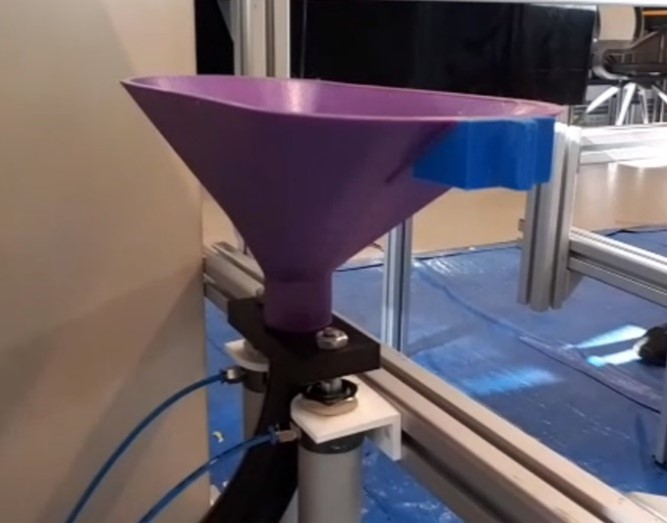
The vacuum tool is placed under the raft and is attached to two pneumatic cylinders. These cylinders are mechanical devices which use the power of compressed air to produce a force in a linear motion. This linear motion makes the vacuum tool go up and down. A vacuum is attached to the tool and can be activated by the robot controller and thus in the program.
Conveyor-belt with IR-sensor
The conveyor belt is controlled by means of a TVerter E2-2010H1F frequency drive and two relays. The outputs of the UR-10 control the two relays which then control the forward and reverse movement of the drive and thus the motor. The IR-Sensor measures point on a raft allowing it to stop the conveyor belt at a certain point where the plants can then be placed.
Vision
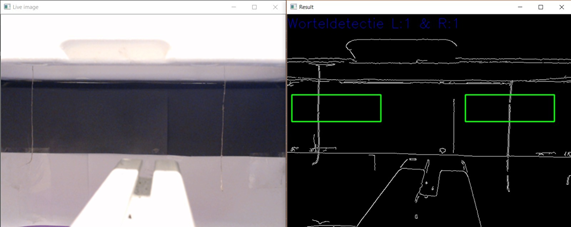
The camera utilized is the Logitech C920 HD webcam. The software applicated to detect the roots is Python with libraries as OpenCV and Modbus client. The camera captures an image right after the robot places the plant within the rafts. Note that the robot is still holding the plants when the image is captured. The captured image focuses only on the areas where roots are expected. This image is then processed by using a variety of filtering techniques to optimize object detection. The image is first converted into grayscale and then the Canny edge detection is used to extract structural information. These edges then get dilatated. These dilated areas are then counted and numbered. An object is detected when the counted area reaches a specific amount. When two objects are detected, a signal is sent to the robot that the roots have been found. The plants are then released into the rafts. If one or no roots are detected, these undetected plants roots are then put in a trash-raft by the robot.
PLC and HMI
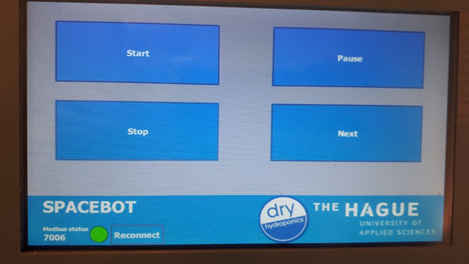
The PLC (Programmable Logic Controller) is the central point in the communication between the various systems. A Modbus Server has been created on this PLC to control the data. The data in this server can be read and adjusted by different clients such as the UR-10 and the vision code. The HMI (Human Machine Interface) is a screen on which the robot can be controlled intuitively. This HMI communicates with the PLC via Siemens’ profinet.
Conclusion
At the end of the day, we have achieved a good end result. This proof of concept has succeeded and the customer will be able to look at further automation solutions that work together with their products. We would like to thank all the lecturers and involved employees of The Hague University of Aplied Sciences for their help with this project. Special thanks to Thijs Brilleman and Mathijs van der Vegt for their support.