

This Project was carried out for SMR1 during the February 2025 Term by Team Flux: Aaron McGlynn | Jeroen Douw | Glenn de Jonge | Ilmar Nan
Press Release
SMR ANNOUNCES 3D PRINT PIPELINE AUTOMATION TO ENABLE MAGNETO SYSTEMS TO SCALE UP PRODUCTION TO INDUSTRIAL LEVELS
The SMR minor of The University of The Hague will work with Magneto Systems to automate parts of their 3D Print Pipeline.
Intro Paragraph: [Delft, Zuid-Holland]–[Intended Launch Date: 15/04/2025 ] – The SMR minor of The University of The Hague starts a project to automate parts of the 3D print pipeline of Magneto Systems. This will allow them to scale up productions, in a save and manageable way, with machine vision. Allowing them to improve their production and speeding up clean and efficient cooling & heating solutions.
Customer Problems: Currently Magneto moves, weights and sorts their produce by hand. This process takes time, money and is prone to human error.
Solution: By creating a robot-arm that picks up the 3D printed blocks from the oven, weighing the blocks and sorting them accordingly. This will improve the efficiency and production time.
Leader’s Quote:
“we decided to tackle this project as we thought it would be an interesting undertaking and we believe the company fights for a good cause, reducing environmental waste.”
– Aaron
Customer’s Job-to-be-Done:
The customer requests our skills to automate the weighing and sorting process of their bricks, before and after the treatment process.
Customer Quote:
"We are scaling up our production process and the process of weighing them by hand is simply taking too much time”
– Jilles Langeveld
Manager Production and Product Development
Magneto
FAQs
Who is your customer?
Magneto Systems
How will this make your customer’s life significantly better? Solve their pain point?
Reduce manual labour in the hot lab reducing chance of human error and increase production speed.
Why is this a problem that needs to be solved right now?
Magneto Systems cannot supply an adequate number of products and need to increase their productivity
What is the biggest risk in the project?
Machine vision could take a lot of work to carry out and cause many issues that will take time to resolve
How will you measure success?
Does the final iteration of the robot match the specifications of the project.
How does this integrate with existing product features?
It automates the process they currently have going.
What is your rollout plan beyond the home market?
Make videos and put them in resume
What is the most contentious aspect of your product? (What sparks the most intense debate?)
The gripper, movement patterns, labeling, position of camera.
What are the key milestones in your roadmap:
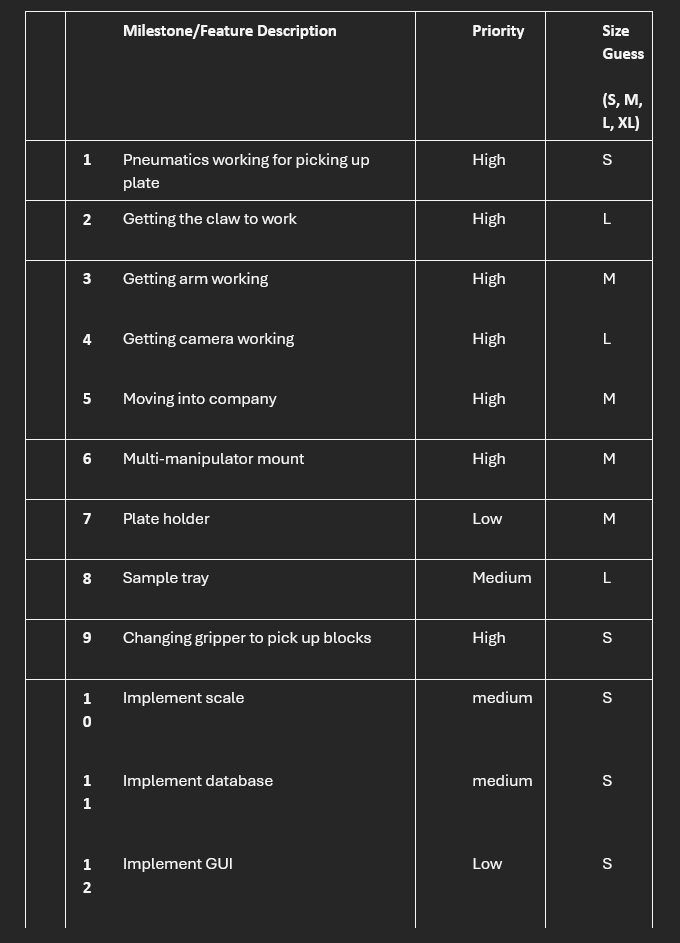
Overview
Magneto Systems are a startup based in Delft. They produce these small blocks, 3D printed from a unique “magnetocaloric” material. The material is mixed with glue to make into a paste that can be 3D printed. Once printed the blocks must be weighed and then heat treated to remove the glue from the mixture, following which, they are weighed again. The block weights are stored in a database and compared so that the company can see how much the blocks have shrunk and thus how much glue has been removed from them.

Problem
The process of weighing each block is currently done by hand and as such is incredibly time consuming and boring. The company would like this process to be automated so that they don’t need to dedicate as much time to the process
Solution
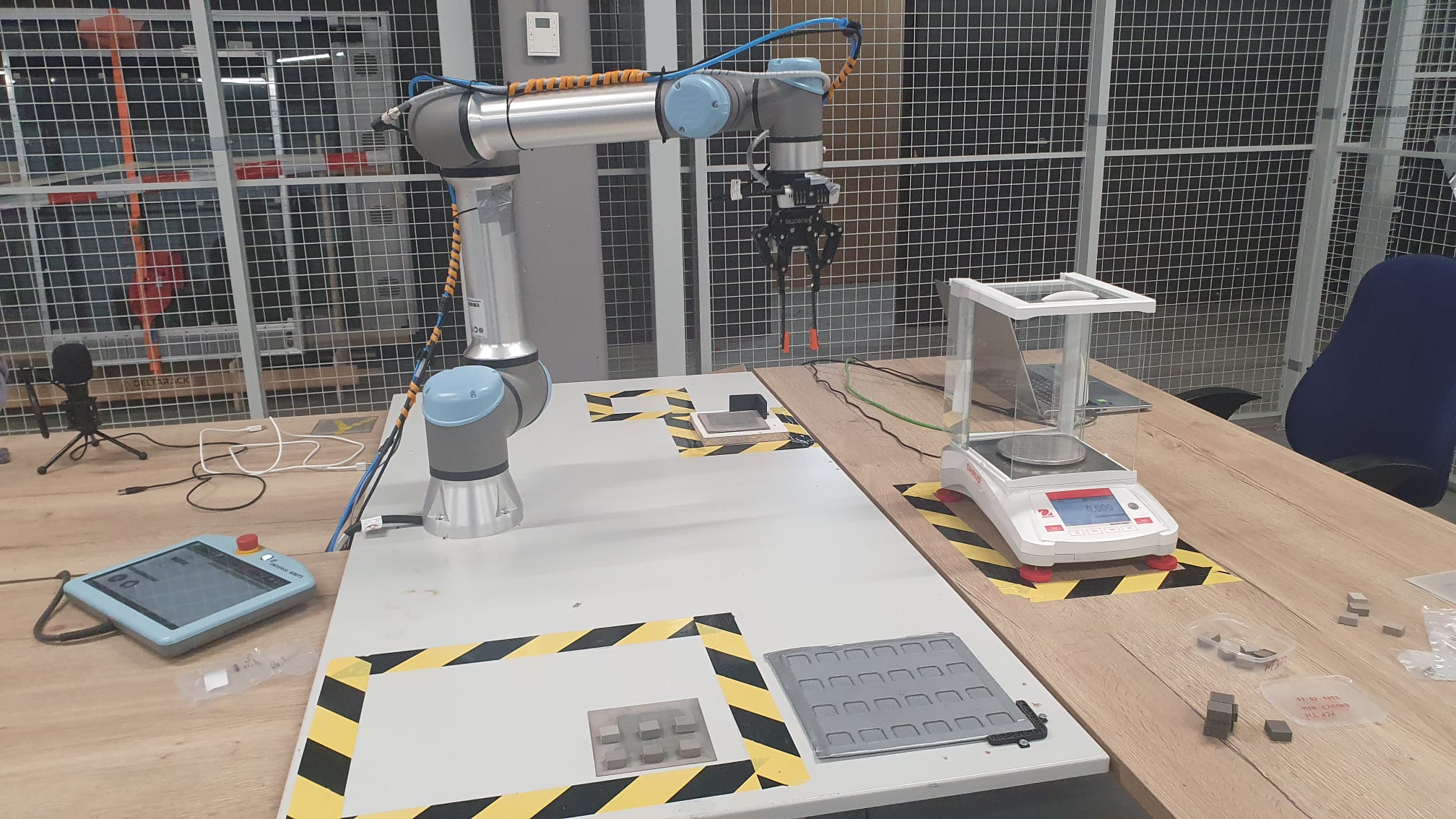
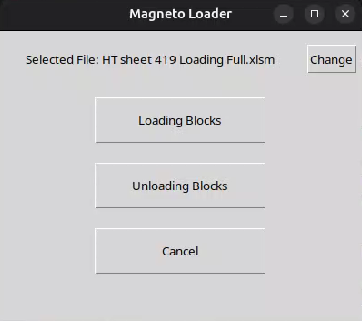
The Solution the group came up with was to create a tray for the sample to be placed upon, once the tray is filled it will be brought to the robot arm, during this time, a plate holder (seen behind the robot arm in the above image) should be filled with enough plates to run the process. Once samples and plates have been Loaded the operator will then fill out a database to tell the robot how many plates to expect and how many samples to load on each plate, the position of the samples on the plate can also be customized. Once the database is created the user can then use the GUI to run the program. In the GUI the user can select which database is to be used and then the user will click on the “Load Plates” option.
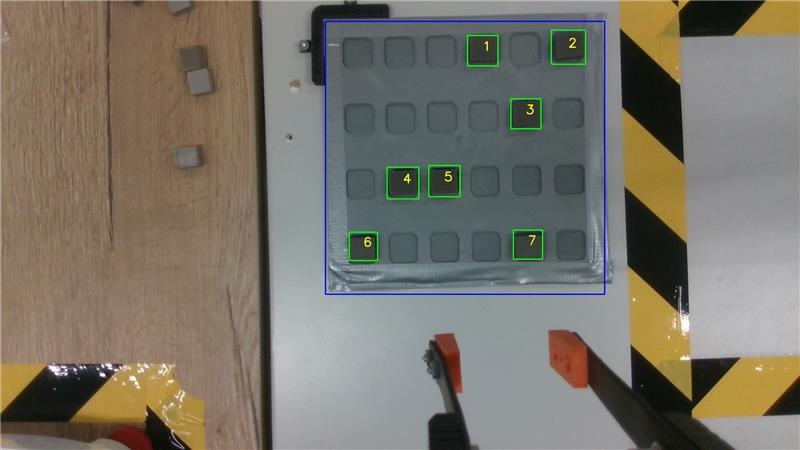
Once selected the robot will navigate to the sample tray, identify the blocks that it can see, ensuring that there are enough to fill out the database.
It will then move to check if there is a plate in the plate holder, if there is it will pick it up and place it in the workstation. Next the robot will pick up the first block, place it in the scale, wait for the scale to give an output, and then place the block on the plate. the scale data will be sent to the database and update the “weight before loading”. the robot will repeat this process until all blocks have been loaded onto the plate before picking up the plate. The robot will re-orient itself to point the suction cups down towards the plate, it will then slowly lower itself until the vacuum sensor reads and output of greater than 15 Bar, so it knows it has suction on the plate. Next the robot will navigate to the loading bay and drop the plate so it is ready to be processed. this cycle will repeat until the all plates have been loaded accordingly.
Once the blocks have been heat treated, they are then brought back to the robot on the same plates, that should be placed within the loading bay area. The user can then select the “unloading” button in the GUI. The robot will navigate to the loading bay and take a photo and Identify all plates that it can see.
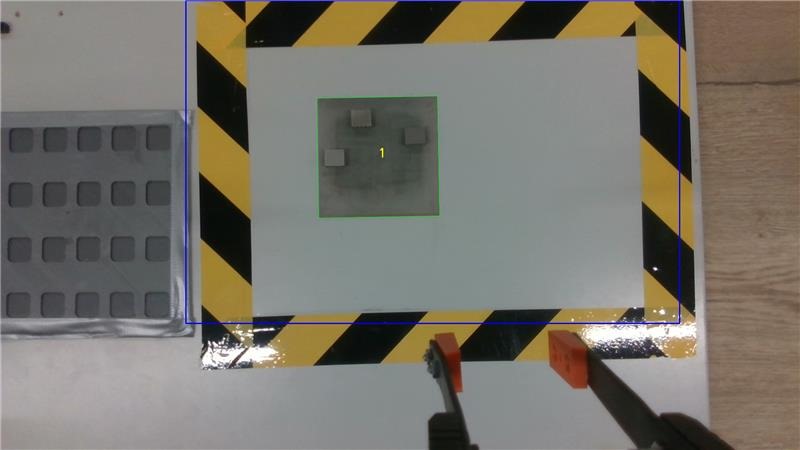
then it will take the plates back the workstation and and identify the blocks using a depth vision camera.
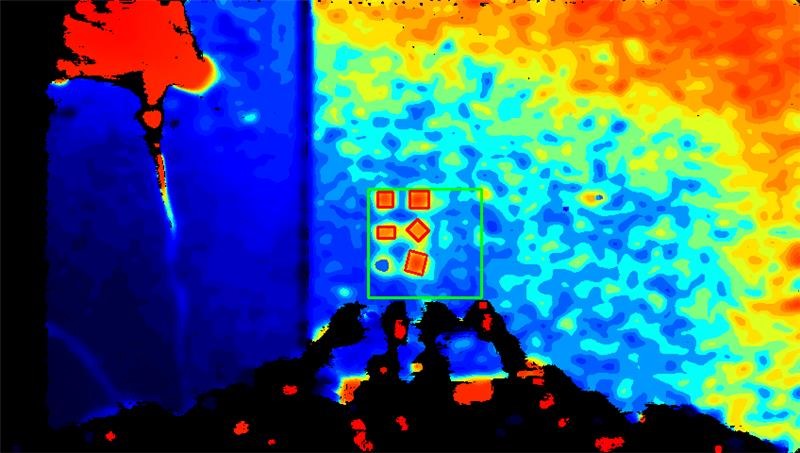
once it has identified the blocks it will navigate to each of them, picking them up and weighing them, and placing them back onto the sample tray. Once all blocks are offloaded the plate will be removed from the workstation and placed to the side.
once completed the sample tray will be holding all treated blocks and the database will be filled out with all weights before and after the treatment process for the company to see
Customer Quote
“At Magneto, we’re at the edge of R&D and production. We are gradually scaling up the number of metallic blocks that we produce per month, while the production process is also still in development. Before the start of the project, it was difficult to judge how much time it would take to automate certain steps of the process, and thereby how long it would take to have a return on (time) investment. Besides, I didn’t have a feeling for the flexibility of such a system. Would it be able to adapt to our changes in the production process over time, and from batch to batch?
The student team showed me that it is possible to setup such a process in just a few weeks. It doesn’t require expensive people with 15 years of experience in automation. And now that the system is able to ‘see’ our blocks from all different backgrounds, pick up different shapes, and place them to the positions determined by our own standard excel format, the path has been paved to integrate more and more steps. Before this project, people have called me too optimistic on automation. The student team has proved them wrong.”– Jilles Langeveld
Manager Production and Product Development
Magneto
Future Improvement
- currently the system will assume that there is the right number of plates in the holder (i.e. if it is told to load 2 it will only assume there are 2 in the holder) as such if there are more plates the robot will crush them, this should be rectified so the robot should work regardless of how many plates are in the holder
- The claws on the end of the gripper should be made of a more elastic material so that it can spring back into shape after bending from picking up the blocks
- The company has certain smaller blocks that are used for quality control, the system currently cannot work these smaller blocks
- a barrier between user and machine should be implemented if this was to be made industrial
- The plate holder should be redesigned to be more professional