Kerckhaert Project Hoofrasp
Project team:

- Kevin Buch
- Mechatronics
- @Kevin
- +31 6 41272794

- 22093079@student.hhs.nl:email:
- Kevin Buch
- Bram Leinberger
- Mechanical Engineering
- @bram.leinberger
- +31 6 57854705
- 18092691@student.hhs.nl:email:
- Bram Leinberger
- Naman Kayastha
- Mechatronica
- @Naman
- +31 6 87994290
- 22086684@student.hhs.nl
- Naman Kayastha
- Youri Beugelsdijk
- Mechatronica
- @Youri
- +31 6 23476992
- 22072985@student.hhs.nl
- Youri Beugelsdijk
Press release:
Kerckhaert announces automation for cut machines to improve hoofrasp production
By projectteam Hoofrasp from THUAS
07-05-2025
Introduction
This project details the realisation of a prove of concept regarding automation of the placement into the upper- and overcut machine. This is one part of the complete automation of the production line for the hoofrasps Kerckhaert is developing. The duration for this project is seven weeks.
Problem paragraph
The product that will be developed solves the problem of having dull manual labour needed to place the rasps into the machine. Furthermore this product will also create a solution for storing the rasps after they have been machined. Furthermore this product will create a cheaper way of manufacturing the hoofrasps by being able to produce them quicker and more beneficially.
Solution paragraph
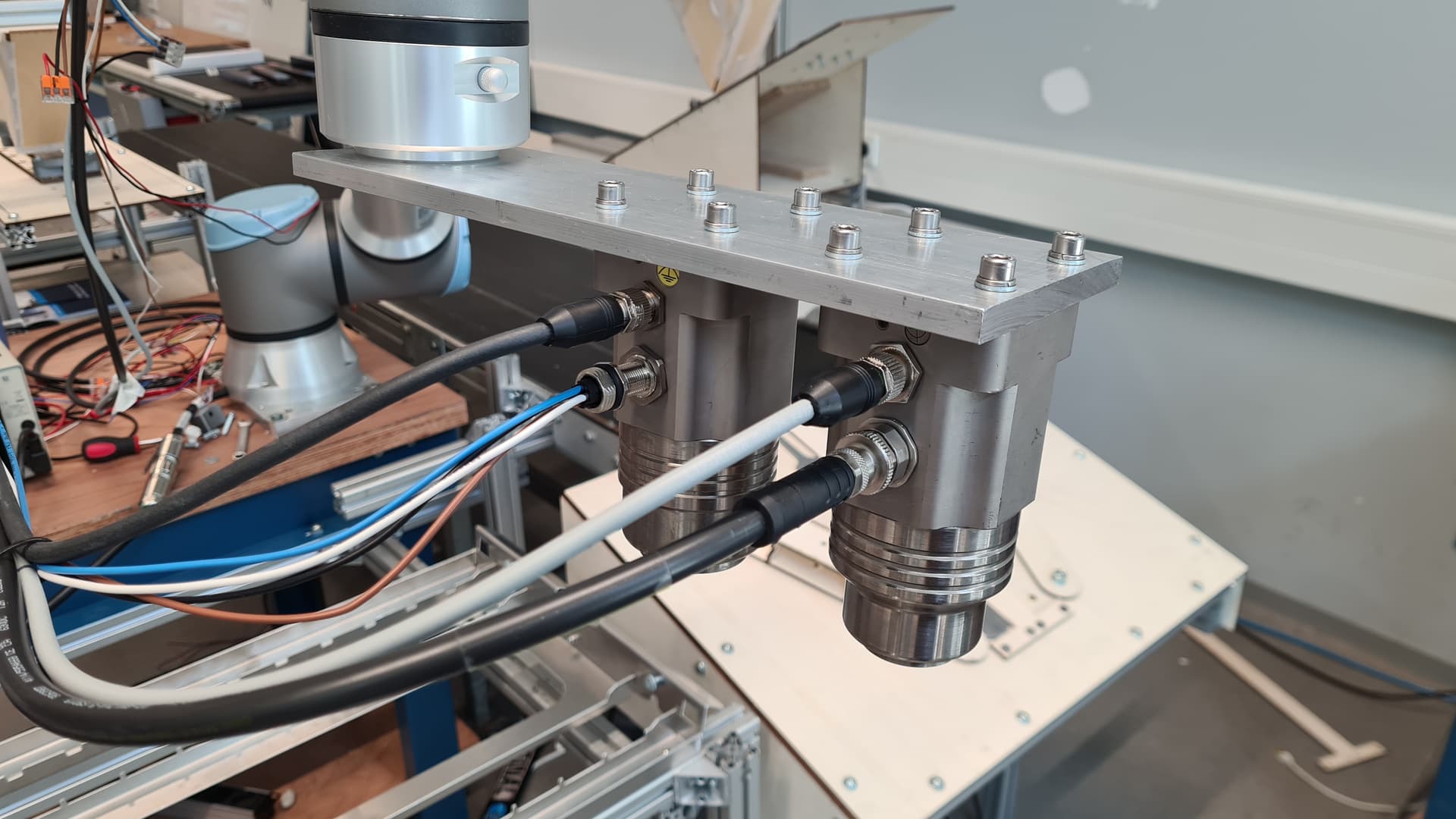
The product completely eliminates the need for manual labour to place the rasps into the cut machines. It does this by picking and placing the rasps with a magnet placed on a robotic arm. Furthermore, is has been agreed upon with the client that a tray, holding twelve rasps is used to store the rasps after they have been machined. The robotic arm places them into the correct tray positions. Finally, the cycle time of the product improves the total volume that can be handled. It does this by having a small buffer to make sure the arm is constantly picking and placing rasps.
How the product works
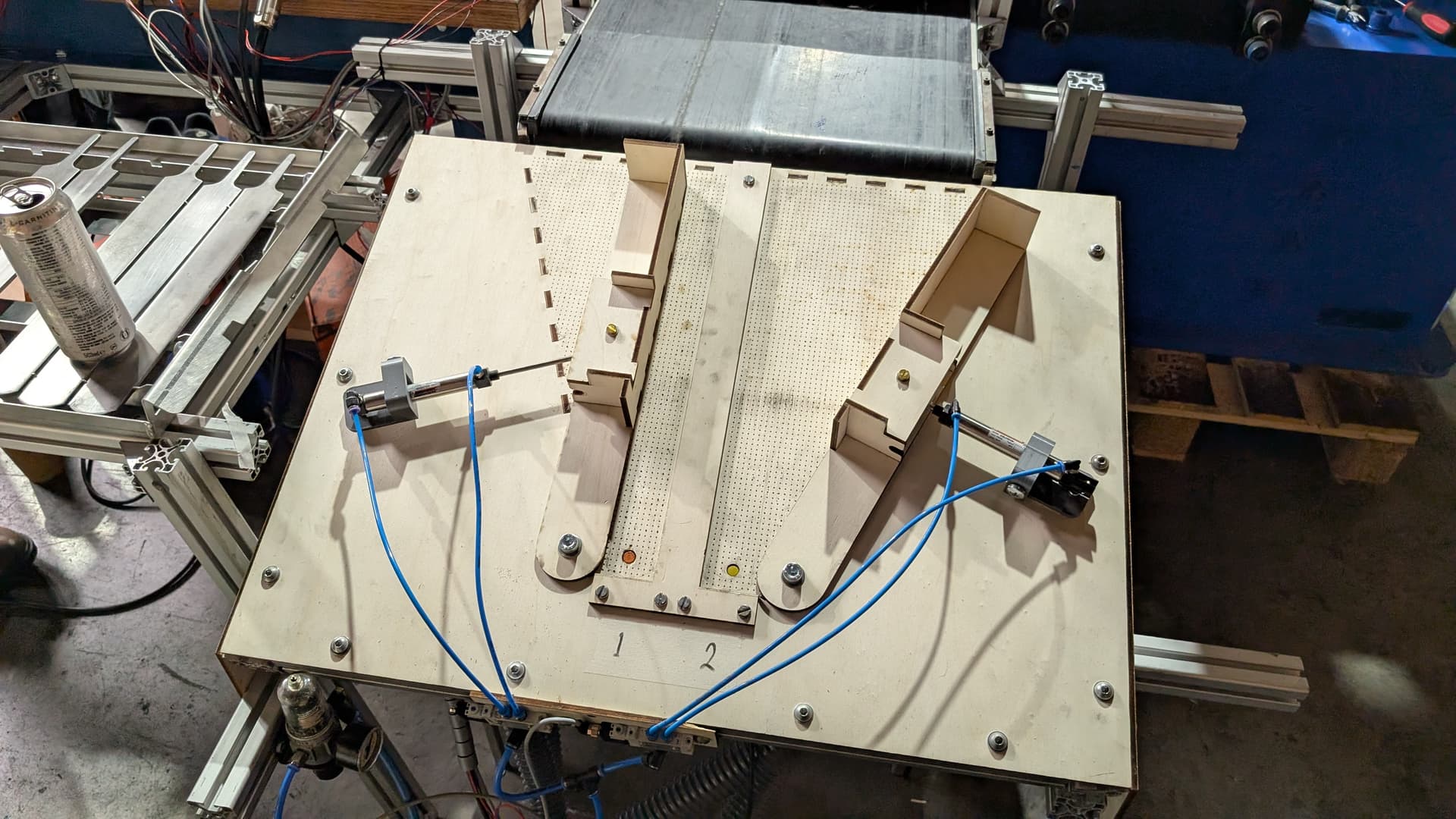
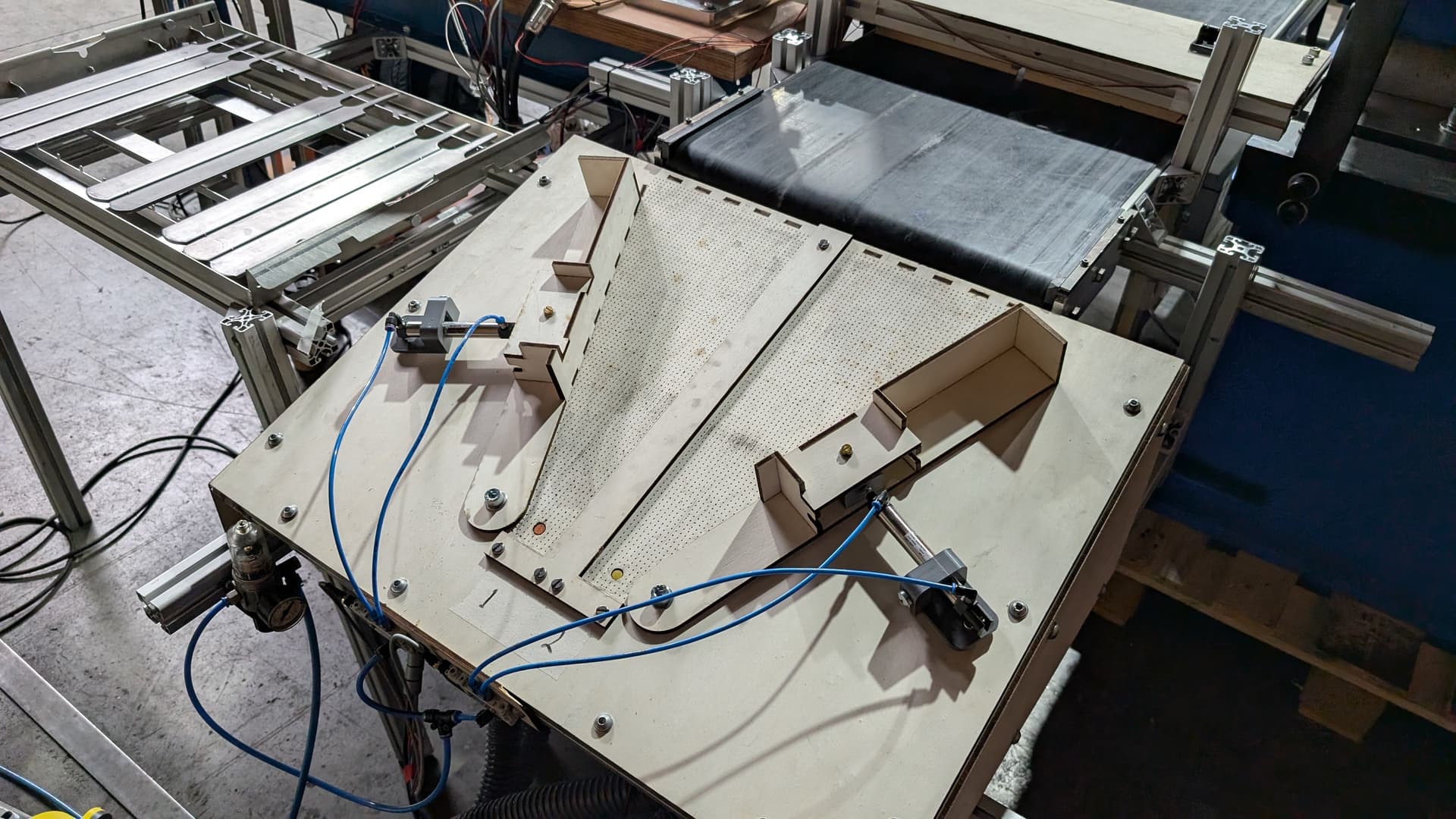
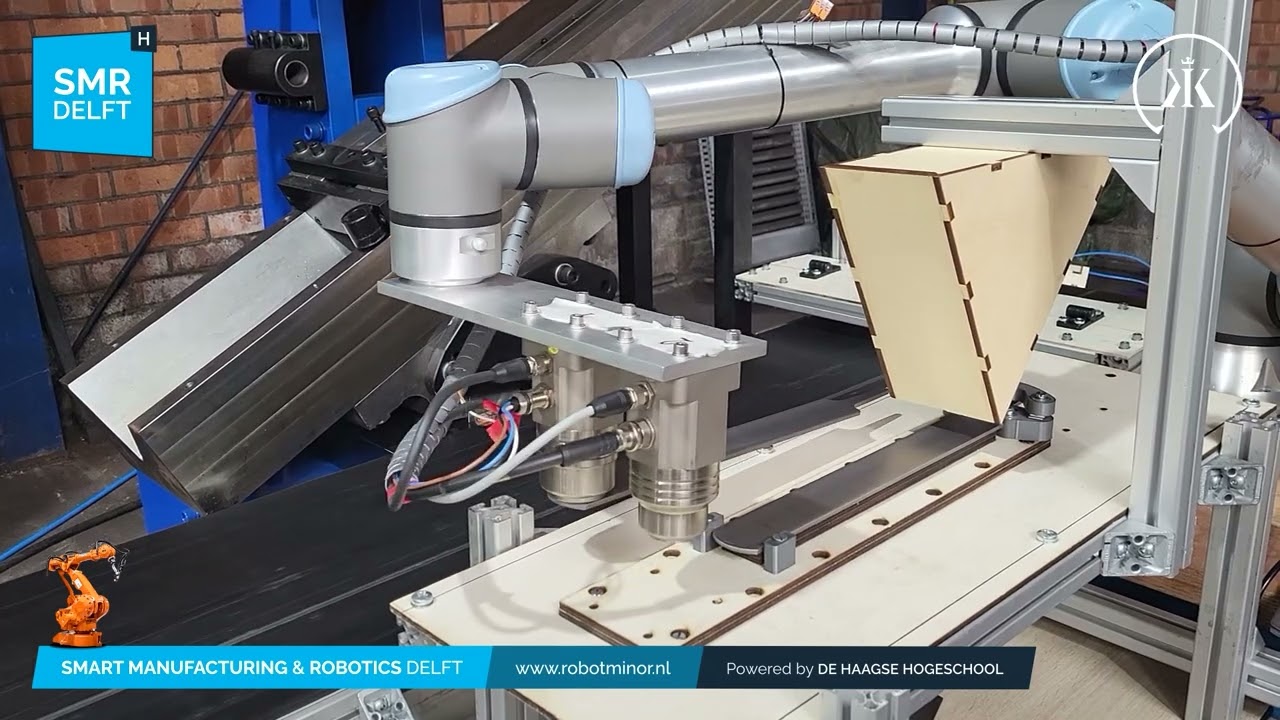
The process of the product starts with two rasps being supplied on the conveyer belt, these are laying side by side with space between them. At the end of the conveyor belt an air cushion funneltrack sits. This allows the rasp to slide into the funnel with little friction at the underneath. An induction sensor then detects whether a rasp is in position in the funnel and then sends a signal that activates a cylinder, pushing the rasps into a fixed position. This is mirrored on the other side of the funnel allowing up to two rasps to be handled simultaneously. Then a robotic arm with two magnets picks up the rasp. It then moves to the overcut machine, the magnet not holding a rasp picks up the previous cycled rasp out the machine and then places the new rasp into the overcut machine. After that the arm moves to the uppercut machine, picking up that previously cycled rasp and places the new rasp into the uppercut machine. Then the rasp that is picked up and has been fully machines is placed into the correct slot in the tray. Now the cycle is repeated, finishing the rasps that are now sitting in the machines.
At the end of the conveyer belt, a rasp detection system senses whether there are rasps about to exit the conveyor. This makes sure that when there is a rasp already laying in the funnel, the conveyor is stopped, making it so that no jams are created.
Article
Overall the prove of concept product that was developed and realised for kerckhaert was an overall succes. The collaboration and contact between the project team and the contacts of Kerckhaert was super nice and positive. Below the pictures can be found that were made of the final product.