Students : Freek Verloop | Rick Perquin | Daniel Paans | Aurelia Adventa Ayuprashinta
The Company
AV Flexologic is a company that specializes in supplying innovative solutions for the prepress and flexographic industry. They have gained recognition for their ability in developing and manufacturing equipment and software used in the flexographic printing process. Flexography is a widely used printing technology for packaging materials, labels, and flexible substrates. AV Flexologic is dedicated to advancing their solutions by introducing new and improved offerings for their customers, such as automated plate mounting systems, enhanced plate-making equipment, and innovative software for color management.
The Project
I/O Diagram – Tetra Pak Sleeve Handling Manually by Employee
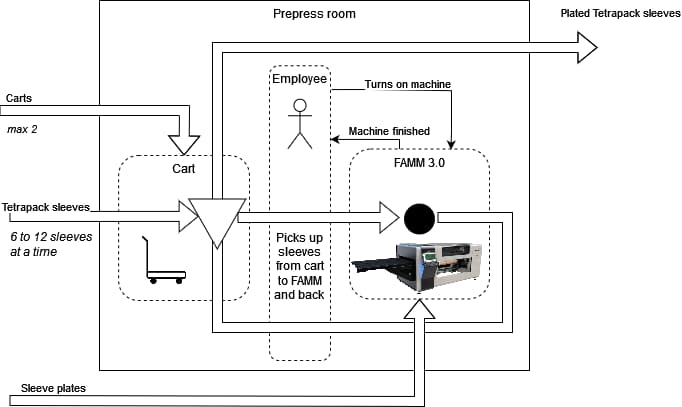
AV Flexologic is introducing a product aimed at streamlining the handling of Tetra Pak sleeves. Historically, employees manually mounted Tetra Pak sleeves onto the mounting machine. To enhance the efficiency and precision of this process, the company has proposed the integration of robotic help. In pursuit of this goal, we are designing a specialized gripper capable of extracting sleeves from Tetra Pak carts and transferring them to either the FAMM 3.0 system or the Tape Station used for simulation.
The gripper under development is engineered to ensure precision when positioning the sleeves and can handle sleeves weighing up to 25 kilograms, supplying versatility for various Tetra Pak applications. Additionally, the project includes the design of a docking station for the Tetra Pak cart.
Our Solution
I/O Diagram – Tetra Pak Sleeve Handling with Robot
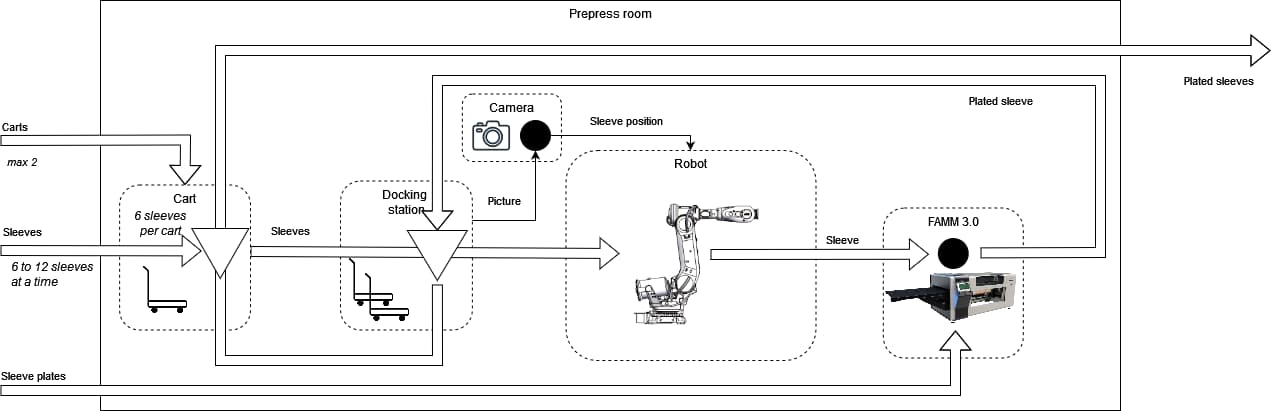
The project incorporates a docking station with the capacity to hold a maximum of two carts, with each cart capable of carrying up to six sleeves. This configuration enables the project to handle up to 12 sleeves simultaneously. A camera has been installed on top of the docking station, serving a crucial role in guiding the robot by supplying the coordinates of each sleeve on the cart.
The process involves the following steps:
When the robot picks up a sleeve, it initially positions it over a sensor to find the slot. If the sensor does not detect the slot during the lifting process, the robot rotates its arm. Subsequently, the sleeve is placed on FAMM 3.0 for further processing. Once FAMM 3.0 completes its operation, the cycle is repeated in reverse.
End-of-Arm-Tool Design
End-of-Arm-Tool Design and Prototype
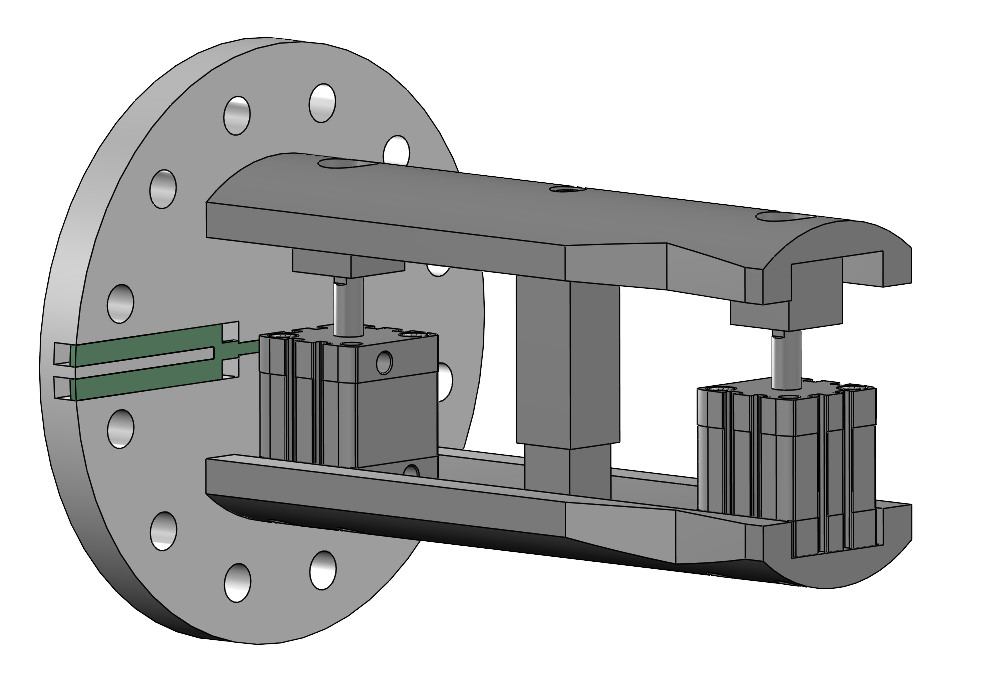

Our End-of-Arm Tool (EOAT) had to do two things: pick Tetra Pak sleeves from the inside and then turn them flat to put them precisely on the mandrel. The outside of the sleeves is sticky, and if we tried to pick them from the outside after they had the plates on, we might mess up the product.
The gripper we made uses pneumatic technology and fits the inside of the Tetra Pak sleeves. We added a special air cylinder that makes the gripper bigger when needed. This way, it can safely hold the sleeve when it’s picked up without dropping it.
But here’s the cool part: our gripper also has a ‘V-shape’ thing that uses friction to help. Since we can’t just use the gripper to push the sleeve all the way onto the mandrel, the ‘V-shape’ helps move the sleeve until it’s fully on. It does this by creating some friction against the sleeve. This way, the robot arm can make sure the sleeve goes on exactly right and is safe.
Docking Station
Designated Area Marked with Black Tape as a Docking Station

Our “docking station” is not a conventional physical structure, rather, it is a square-shaped area that we’ve delineated by affixing black tape onto the ground. This designated area serves as a strategic point accessible to both the camera and the robot arm. When the cart, filled with sleeves, is positioned within the area of the docking station, it ensures that the robot arm can effectively reach the sleeves based on the positional data relayed by the camera. This arrangement allows the robot to make necessary adjustments in its approach for picking up the sleeves, considering their specific locations on the cart.
Machine Vision and Laser Sensor
Calibrating Sleeves with ChArUco Board and Baumer Laser Sensor for Slot Detection
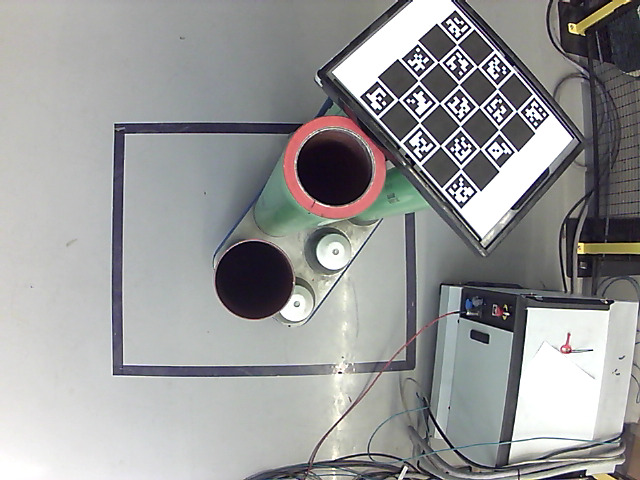

Our project’s main goal is to improve the process of mounting sleeves onto the mandrel with the help of a robot. To make the robot understand where to pick and place the sleeves, we’ve added a camera and a laser sensor to the mix.
For effective machine vision, we go through some important steps. First, we address any camera lens distortion in a process called intrinsic camera calibration. Instead of using a traditional chessboard pattern, we use a more advanced ChArUco board, which is like a modified chessboard with extra markers. It’s great because it doesn’t need all the board’s corners to be visible in the camera’s view. The camera’s software can figure out where the non-visible corners are. After the camera is ready, we move on to extrinsic camera calibration. This part involves mapping pixel coordinates that the camera sees to real-world points, so the robot knows where things are in the real world. We pick four points on the ground, and we use a pole to help us find the exact spots at the top of the sleeves.
Once the camera is all set up, we start detecting sleeves. We look for the round tops of the sleeves using a method called blob detection.
After picking the sleeve with the help of the camera, the robot will then lift the sleeve over the laser sensor. As the laser sensor trying to detect the slot, the robot arm will help by rotating the sleeve until the sensor finds the slot.
Project Result
As the project concludes, the Tetra Pak Sleeve Handling Robot proficiently performs the task of mounting sleeves onto the mandrel. It achieves this with the aid of coordinated systems. The vision system guides the robot by supplying sleeve coordinates, while the sensor efficiently finds slots on the sleeves. Furthermore, the camera’s vision aids the robot in making informed decisions about how-to pick-up sleeves from the cart, considering their individual position.