Students: Mathijs Frank, Pascal Christiaanse.
The team
Mathijs Frank | https://www.linkedin.com/in/mathijs-frank-746839111/
Pascal Christiaanse | https://www.linkedin.com/in/pascal-christiaanse-3a02a4160/
The challenge
When people are in need of search and rescue, often the rescue part isn’t the problem. It’s finding the person that requires help within a short amount of time. Large areas of land are often involved in these search and rescue missions and it can take skilled teams a lot of time to cover inhospitable terrain and difficult environments. This is especially the case in mountainous and forested areas where large height differences can make progress difficult.
The solution
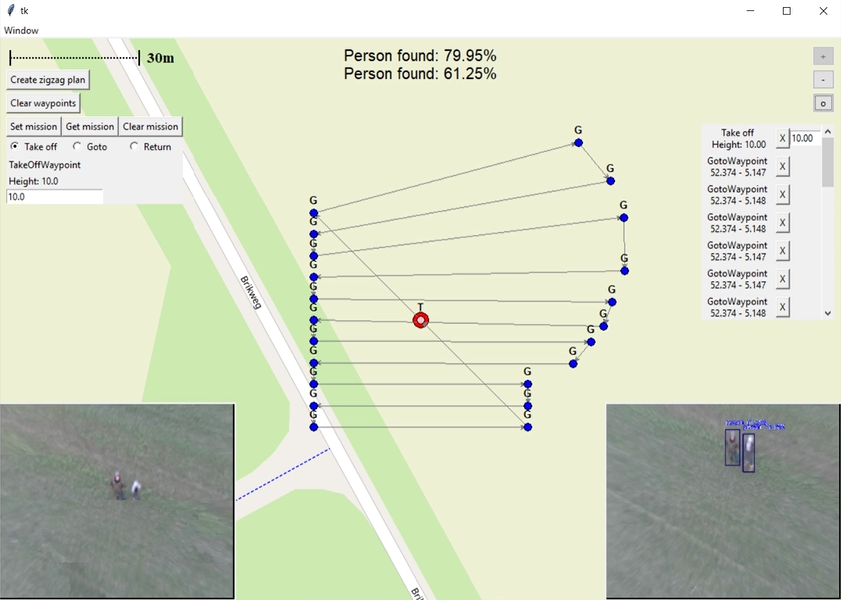
We employed a drone to do the heavy lifting in these situations. A drone is a very maneuverable UAV that can quickly navigate difficult terrain. Using state of the art imaging and machine vision technology, points of interest and live video can now be relayed to a search team for further investigation and action.

The UAV is completely software controlled and does not require a pilot to function. There is however control input available according to legislative requirements. A survey can be planned in the desired search area and can be uploaded to the UAV. It can then be deployed where it will automatically record imagery and send it to a ground station for processing. This processing can be done on any laptop, but preferably with a CUDA compatible GPU. This groundstation could easily be extended to record its findings and display them to the user in the form of points of interest.
Conclusion
During the presentation we have proved that this solution is viable. We achieved better than expected results using the AI we employed and were able to detect people in real-time at a ground altitude of 40 meters. These results were using a resolution of only 480p, on a mid-range laptop. There is clearly lots of room for improvement when resolution and compute power is increased.

Afterthoughts
We encountered heavy vibrations in the frame of the drone that we were unable to resolve completely before the demonstration. There is improvement to be gained by removing these remaining vibrations as this will likely significantly improve image sharpness. Furthermore, using a higher grade camera would be beneficial as this could include a global shutter sensor and a higher resolution. This would increase imagery quality further, making higher altitude surveillance possible.
The AI performed excellently. Our customer expressed interest in further developing this to make the video and AI systems into a separate product which could be suspended on different kinds of drones. There is no such system available yet, so this is an untapped market.
Find us at
Mathijs Frank | https://www.linkedin.com/in/mathijs-frank-746839111/
Pascal Christiaanse | https://www.linkedin.com/in/pascal-christiaanse-3a02a4160/