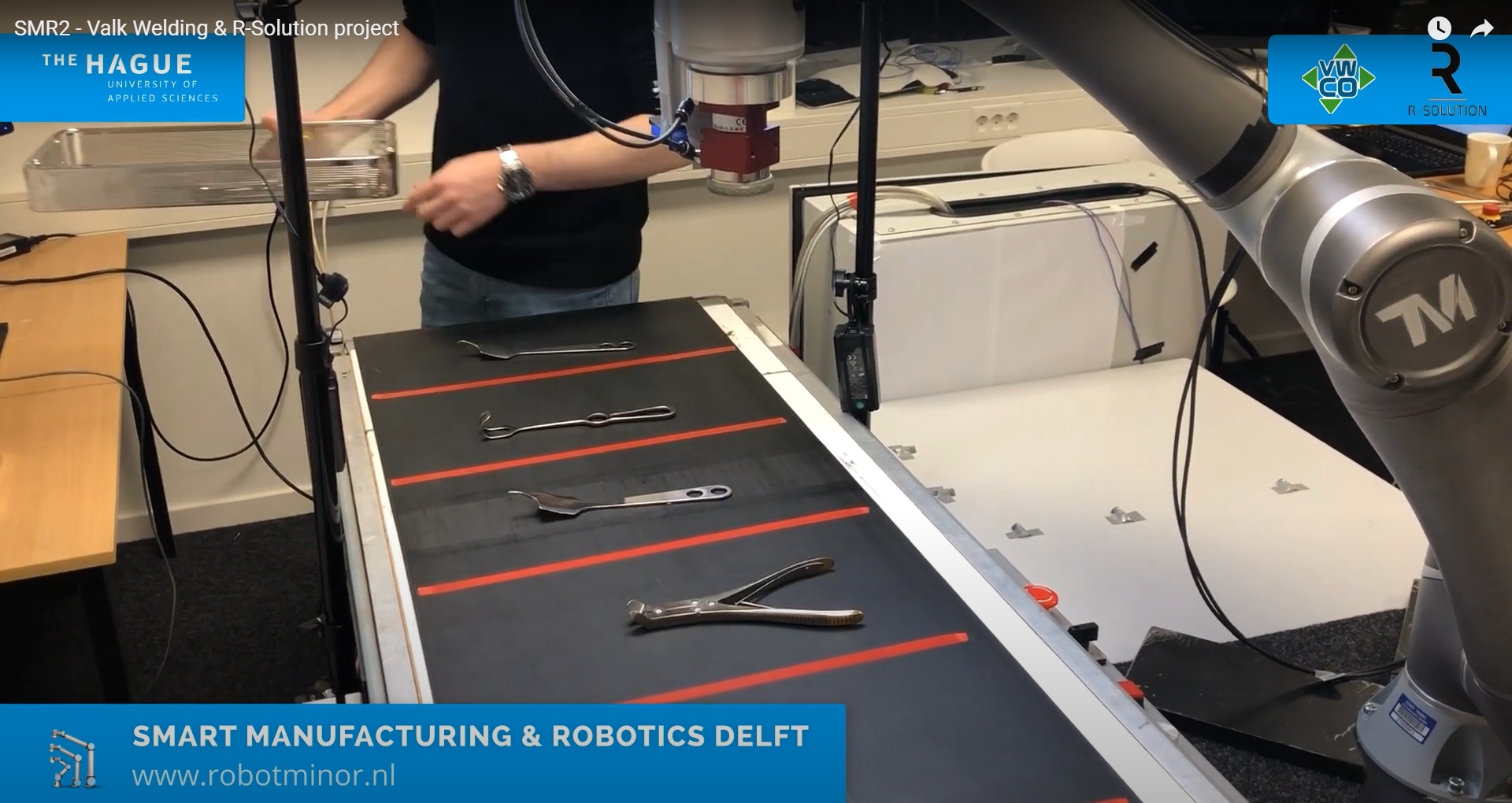
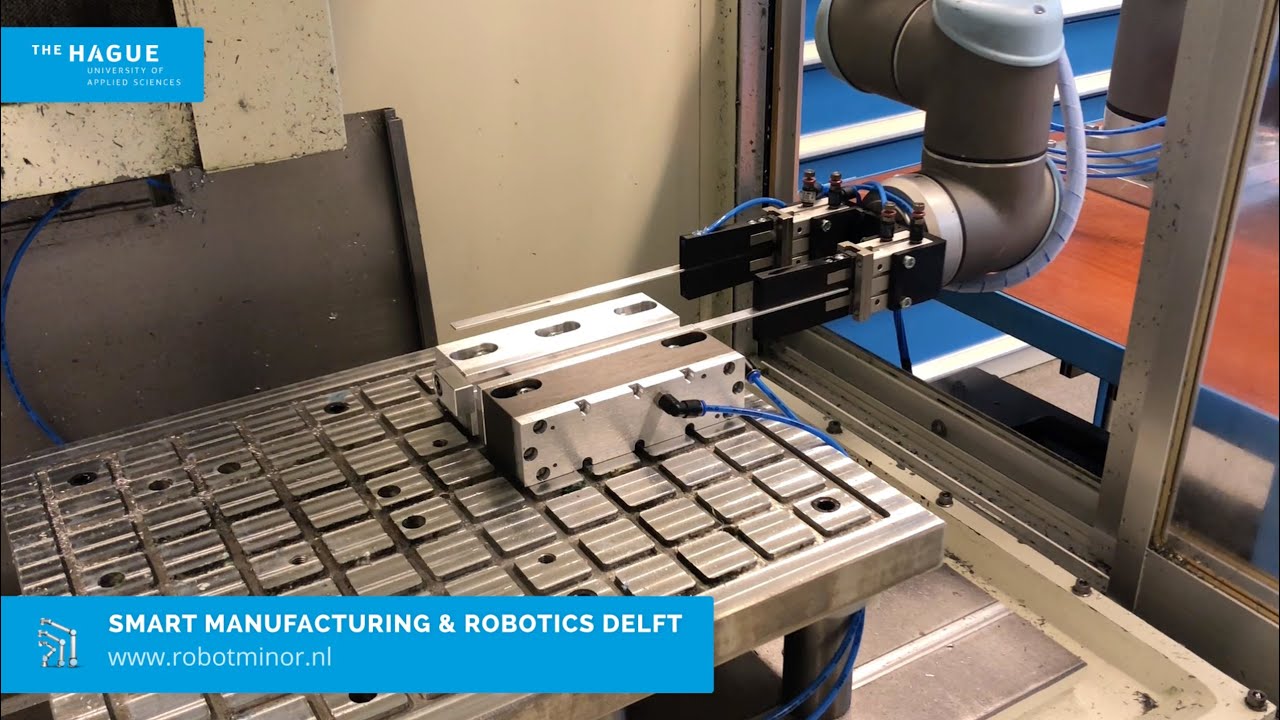
Automated Welding Robot
GRIMBERGEN Grimbergen is a company specializing in innovative custom machine engineering and production systems across various industries. In the realm of machine construction, Robotics and Vision play a significant role. …
We are an award-winning international minor programme in Delft. Our students build state-of-the-art automation prototypes for the industry.

GRIMBERGEN Grimbergen is a company specializing in innovative custom machine engineering and production systems across various industries. In the realm of machine construction, Robotics and Vision play a significant role. …
Students: Dimitar Prisadnikov, Job Valkenburg, Kaj van Beest, Shiyar Jamo
Students: Jort J. Leroij, Joël A. Bruinvels, Ixent Cornella Vilana , Guillermo Forcén Ordovás

Students : Milan Bakker, Rick Perquin, Robin Kouwenhoven, Timo van Eijck (2024)
Students: Emre Gözcü, Donizetta Daffa Aqilla Harley, Lauri Tuomaala & Aurelia Adventa Ayuprashinta

Students: Daniel Paans | Jonas van der Schaaf | Ise Kooij | Robert Westerveld

Students: Luc Van Eck | Max Tienhooven | Pedro Nicolas Cristiansen Hutabarat | Simon Gmeiner Original situation description Colruyt Smart Techniques, an innovative start-up within the Colruyt Group, follows the motto ‘from inspiration to implementation’. Providing many …

Students: Dave Cheung, Margot Driessen, Niels Goos, Deividas Stravinskas GitHub: https://github.com/nielsgs/LanduwascoSMR2
Students : Freek Verloop, Jan Martijn Lobregt, Ibnu Haafizha Yoga, Mumtaz Rahmawan
Students : Marcos Barrera, Tiemen van Rijswijk, Arjan Neelis, Syah Sury Alam, Marko Estrada Rodriguez
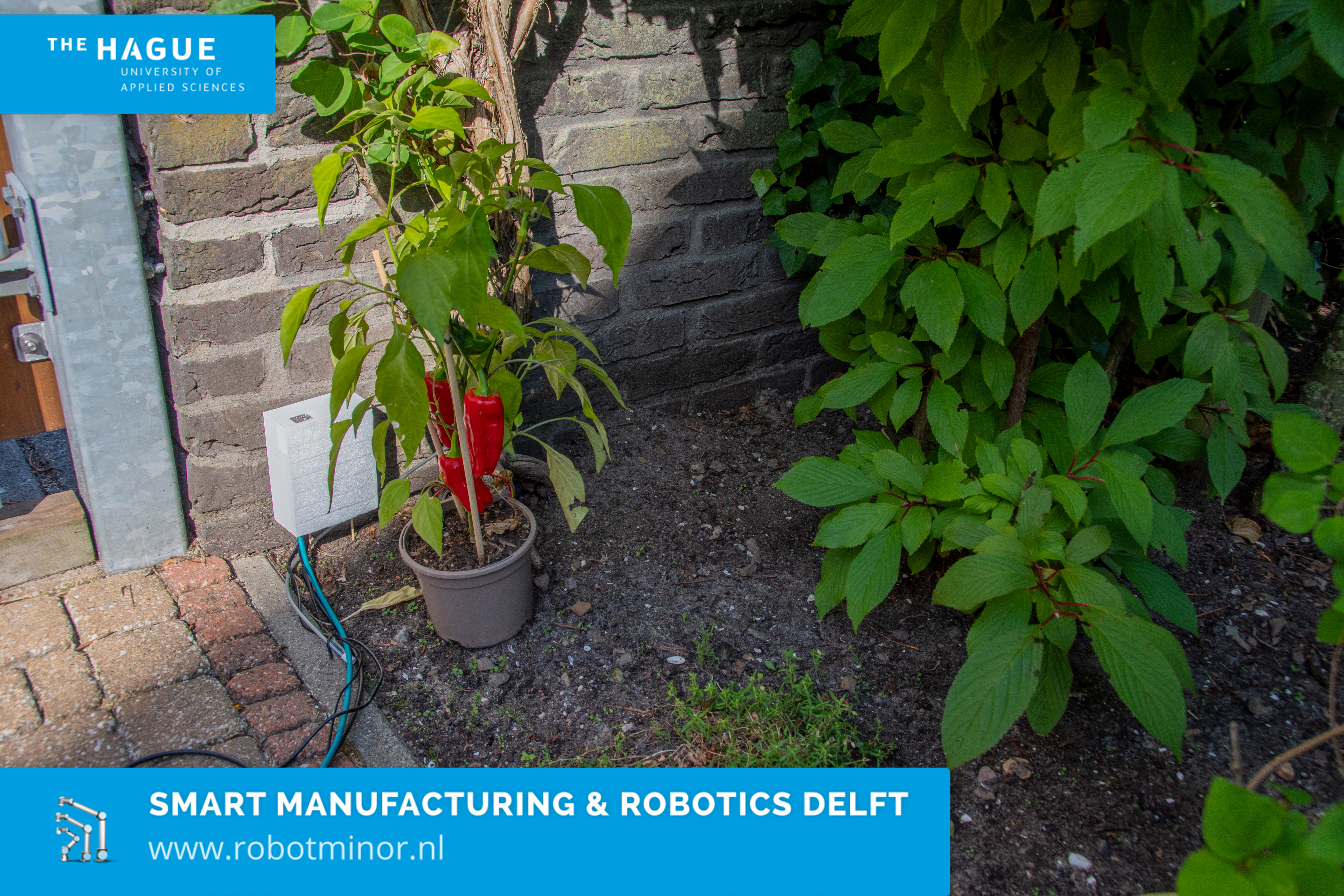
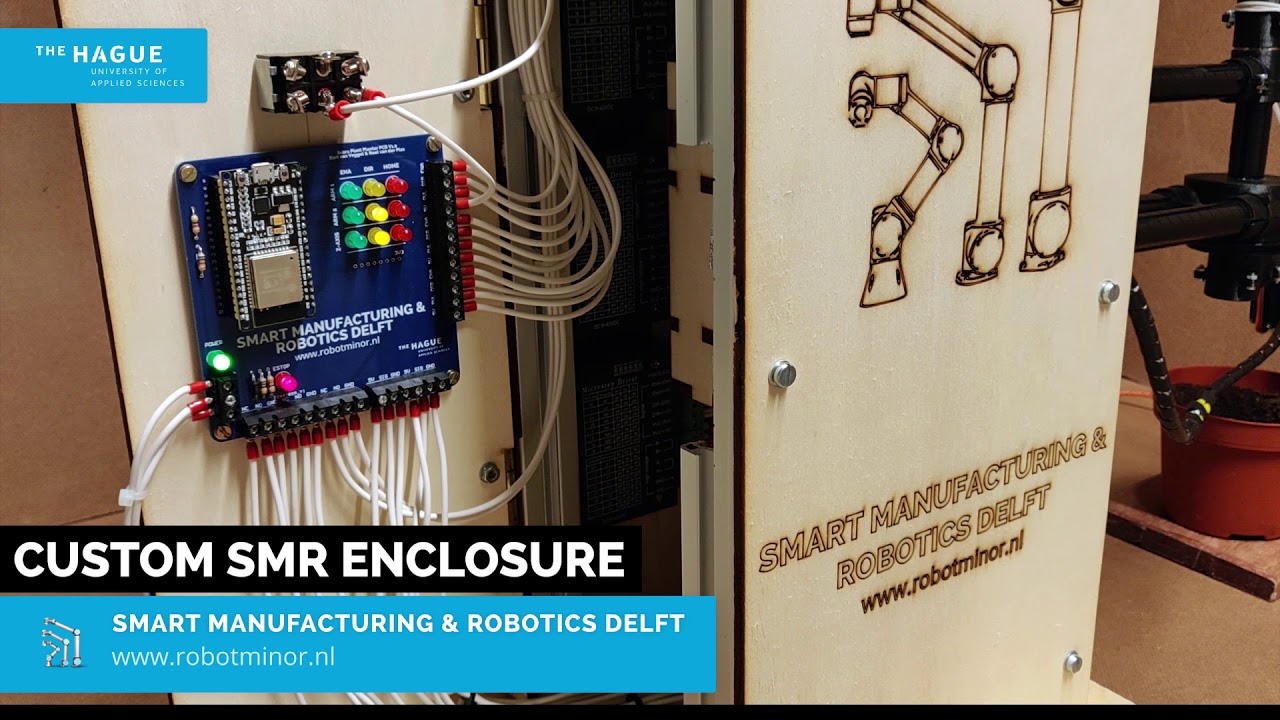
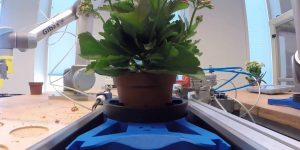
Students: Arjan Neelis, Emre Gözcü, Margot Driessen, Niels Goos Introduction Pats is a start-up company in Delft that monitors and eliminates pests in greenhouses. One of their products is the …

Project member Discipline Phone number Email Robert Westerveld Mechanical Engineering +31 6 28948247 robert.westerveld@xs4all.nl Dave Cheung Mechanical Engineering +31 6 26332593 davecheung3@gmail.com Marcos Barrera Telecom Engineering +34 6 08064827 …

Group Members: Hans Tack, Hugo González, Maximo Pacione, Sven Davids
Students: Donizetta Daffa A. H., Ise Kooij, Luc van Eck, Simon Gmeiner. (2023)
Students: Timo van Eijck | Tiemen van Rijswijk | Pedro Nicolas Cristiansen Hutabarat | Max Tienhooven

Students: Jonas van der Schaaf, Jan Martijn Lobregt, Marko Estrada Roddriguez, Mumtaz Rahmawan. (2023)

Students : Freek Verloop | Rick Perquin | Daniel Paans | Aurelia Adventa Ayuprashinta

Students: Robin Kouwenhoven, Milan Bakker, Lauri Tuomaala, Ibnu Haafizha Yoga. (2023)
Students: Jordy De Schepper Arthur Murat Freek van Dongen Joost Michaelis The project was done during the second block of SMR in Summer 2023.

Students: Vincent van den Nouland, Gijs Polderman, Jarik Okkerman, Enno Steenbock

Students: Mart Reumer, Steph Nützel, Esther Killeen I Barbera, Sebastian van der Krans The problem DERC Salotech developed the MagTrack cleaning robot that can clean the sides of ships and oil tanks. By using …
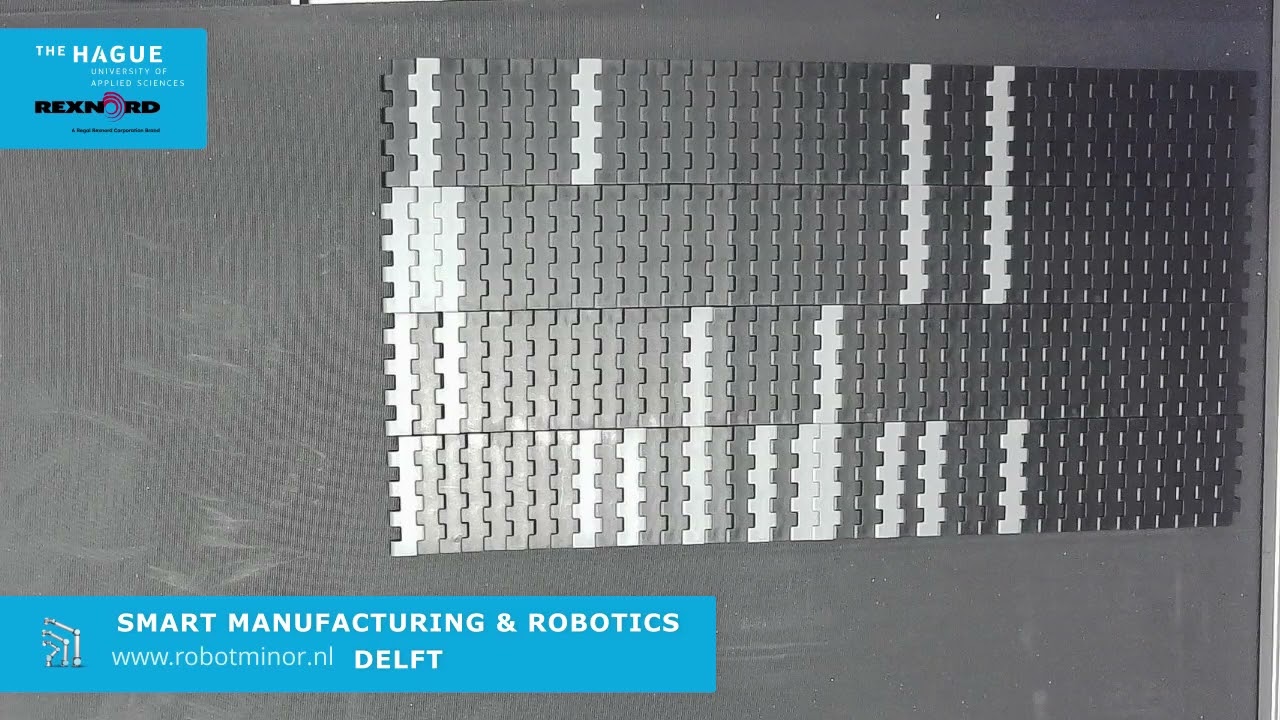
Regal Rexnord Automated Steel Plate Unstacking Watch the video here Group members: Amy Cooke, Jochem Vliegenthart, Lorenzo Burgess Codato, Shivany Anders

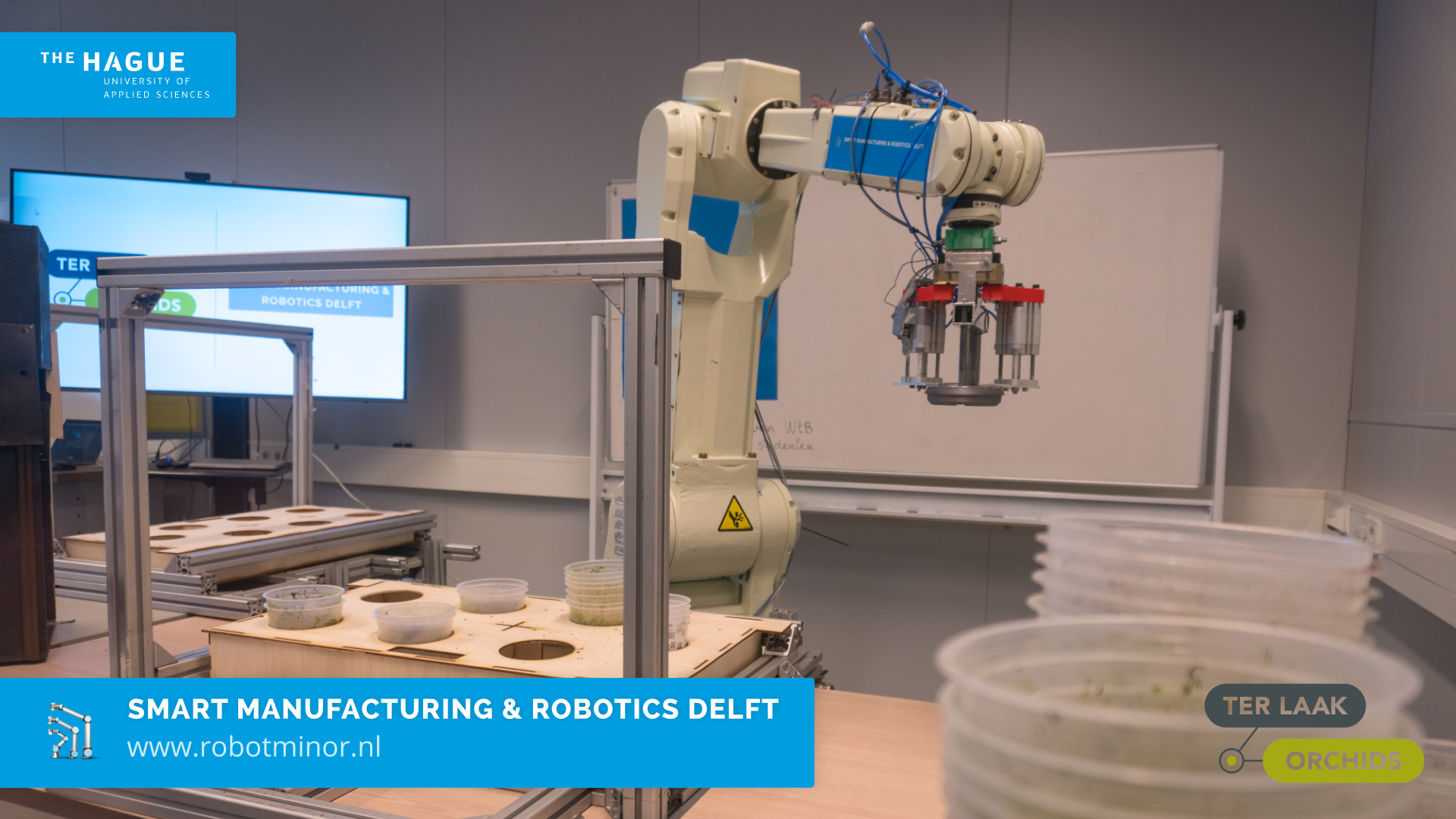
Students: Freek van Dongen, Jordy de Schepper, Esther Killeen I Barberà, Gijs Polderman Introduction Ter Laak is a world leading orchid grower, situated in Wateringen, The Netherlands. By making use of technological innovations …

Current situation The oil tanks located in Rotterdam and other areas need to undergo maintenance in which they will be cleaned. As a part of this maintenance there are …
The company Colruyt deals with over 350 different types of crates which must be unloaded from a carrier on a conveyor belt. Each carrier can contain 40-50 crates. Workers must …

Students: Jarik Okkerman, Jochem Vliegenthart, Mart Reumer, Vincent van den Nouland
The company The client ‘Landuwasco B.V.’ deals in revised Industrial laundry equipment and in integration/robotization of the laundry industry. The customers of Landuwasco are industrial laundries. These customers average have …
Students: Camiel Storms, Robbert van der Heijden, Lars Hartman, Jehangir Khan (2023)
Students: Mees van de Lint, Job Eireiner, Iker Corpas, Ties van der Sar
Students: Jim Kuivenhoven|, Mikko Itäluoma|, Aleksi Mutru|, Jaap van Rekom| Company introduction Metazet is a global market leader of innovative total solutions for the horticultural sector. Metazet offers custom …

Students: Bastiaan Barteling | Peter-Bart van Burik | Chris van Zandvoort

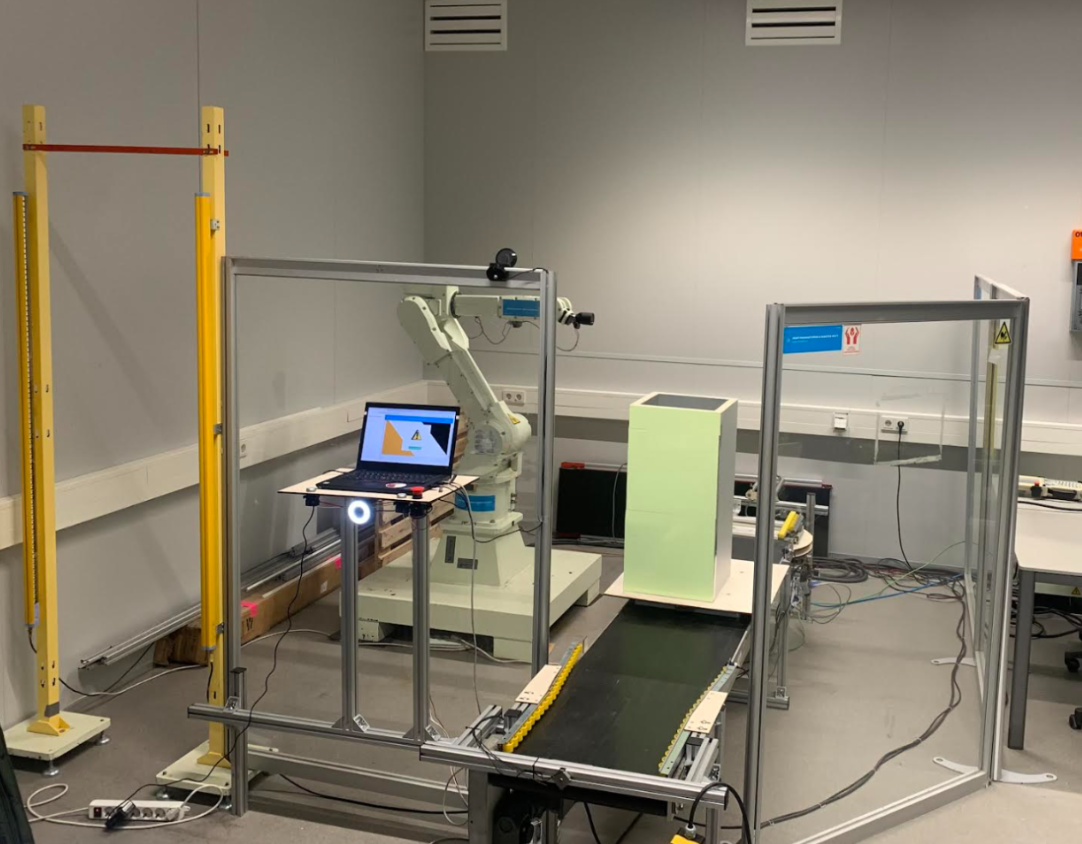
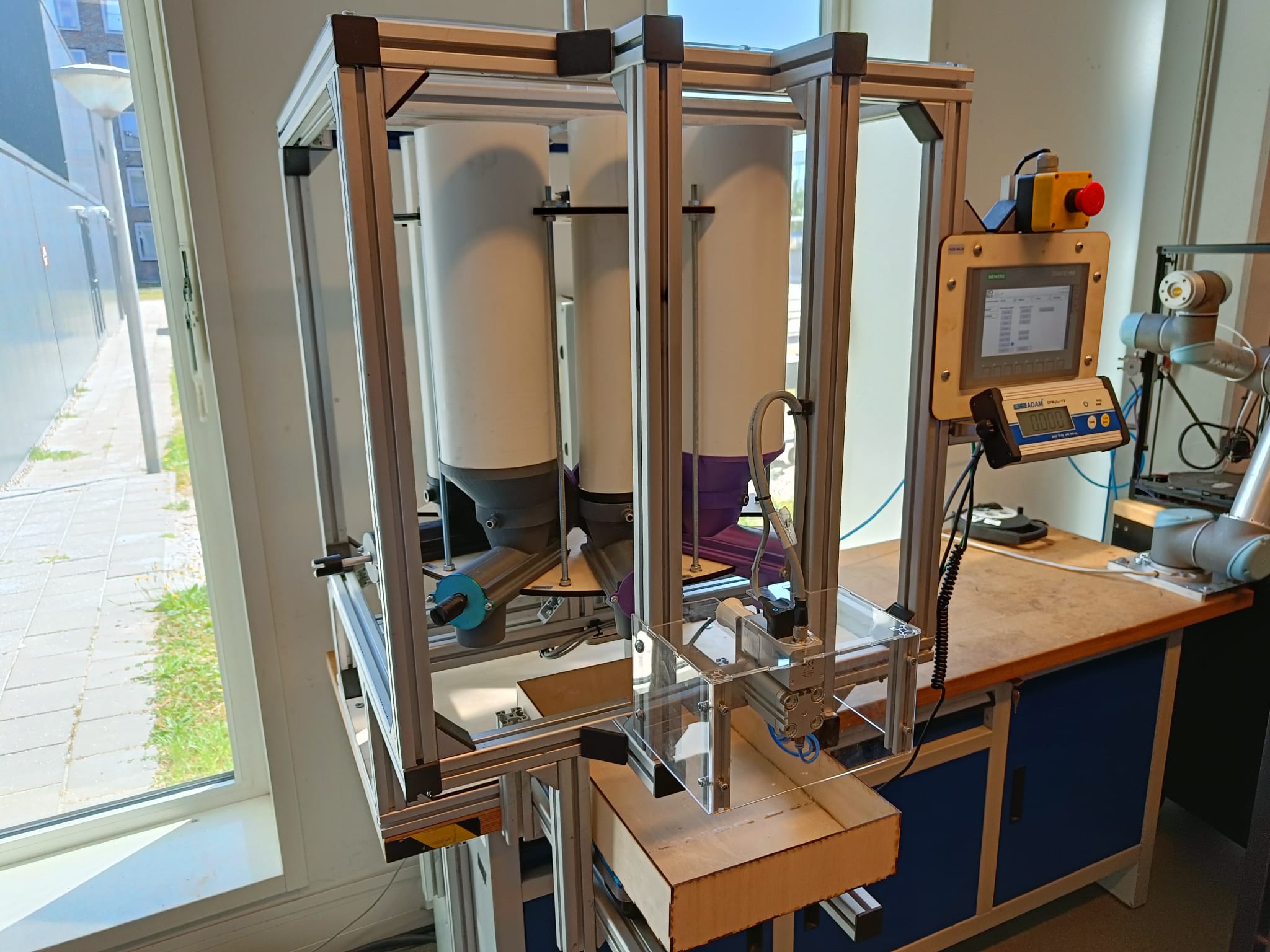
Automated welding robot Grimbergen Industrial Systems, Alphen a/d Rijn Students: Tim de Bondt, Jasper Klerks, Tim van der Voort
Students: Robin van Nieuwenhuijsen, Siebe Burghout, Jehangir Khan Jaap van Rekom(2022)
Students: Mikko Itäluoma, Jim Kluivenhoven, Camiel Storms, Ties van der Sar
Students: Iker Cuervo Corpas, Job Eireiner, Robbert van der Heijden, Mees van de Lint (2022)
Students: Bastiaan Barteling | Peter-Bart van Burik | Chris van Zandvoort
Students: Lars Hartman, Sven Engelchor, Martin Teekens. (2022)

Automated sleeper assembly Grimbergen Industrial Systems, Alphen a/d Rijn Students: Tim de Bondt, Jasper Klerks, Aleksi Mutru, Tim van der Voort (2022)

Project Group: Jonah Eggenkemper | David Israel Maldonado | Noa Veth | Ted Vrijburg The original situation When metal structures are at the end of their technical service life they will be demolished. The client wants …
Students: Mohamed Khedr, Nick Botermans (2022)

Students: Koen Brok, Job Hertog, Ryan Verbaan en Kjeld Vermeulen Introduction De Vreede Techniek is an automation company based in Berkel en Rodenrijs. They supply automation solutions for the greenhouse …

Students: Menno van Dongen | LinkedIn , Johan Lyby Høedt-Rasmussen | LinkedIn, Luc van der Loos | LinkedIn and Imre Bakker | LinkedIn (2022)

Students: Gijs van Haeff, Jip Rasenberg, Marten Haaksema and Wendy Exterkate. (2022)
Students: Wendy Exterkate, Marten Haaksema, Noa Veth, Ted Vrijburg. (2022)
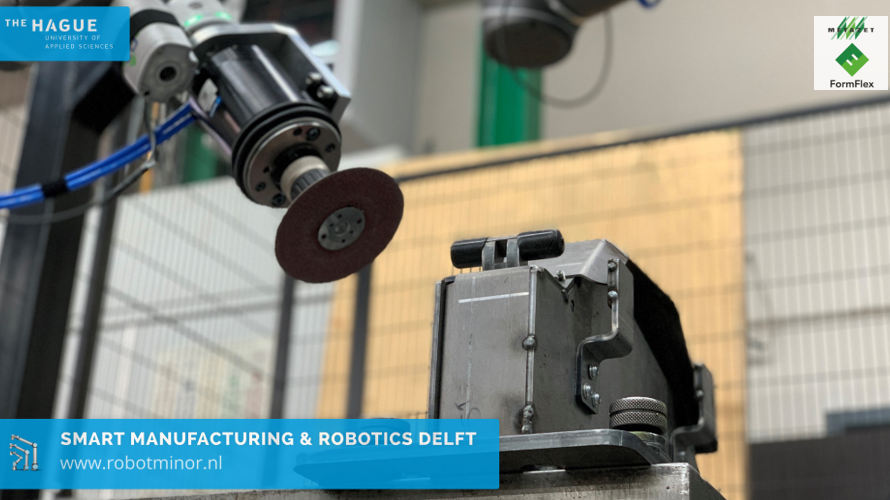
Introduction Metazet Formflex b.v. is mainly a metalworking factory. One of the products they produce is a mudguard for all kinds of electricly driven carts. Metal sheets are bent …
Students: Gijs van Haeff, David Israel Maldonado, Jip Rasenberg and Imre Bakker LinkedIn: We would be happy to connect and answer your questions! Gijs van Haeff | LinkedIn David Israel …
Students: Jonah Eggenkemper |Linkedin Carlos Caro Hernández |Linkedin Mohamed Khedr| Linkedin Kjeld Vermeulen|Linkedin (2022)
Students: Menno van Dongen | LinkedIn , Johan Lyby Høedt-Rasmussen | LinkedIn and Luc van der Loos | LinkedIn. (2022)
Students: Mathijs Frank, Pascal Christiaanse.
Students: Coen van Marrewijk, Tim Kuppens, Bram van der Kooij, René van Rijswijk.
Students: Zeynel Koca, André Hoogesteger, Matthijs Kenis, Martijn Posadinu. (2022)
Students: Daniel Tacoma: Daniel Tacoma | LinkedIn Jelle van Haaster: Jelle van Haaster | LinkedIn Arjan van der Knaap: Arjan Van Der Knaap | LinkedIn Maarten van Geest: Maarten van Geest …

Students: Gianni Meesters, Demi Smeets, René Kuijvenhoven, Timotheüs van den Berg

Students: Ian de Boom, Jaap Knoop, Zarif Osmani and Diederik Ploem
Students: Cesar Pereira Horta , Rwan Fawzy
Students: Gianni Meesters, André Hoogesteger, Diederik Ploem
Students: Hanno Hoeflake, Demi Smeets, René Kuijvenhoven, Timotheüs van den Berg
Students: Bram van der Kooij, Martijn Posadinu, Zarif Osmani, Cesar Pereira Horta. (2021)
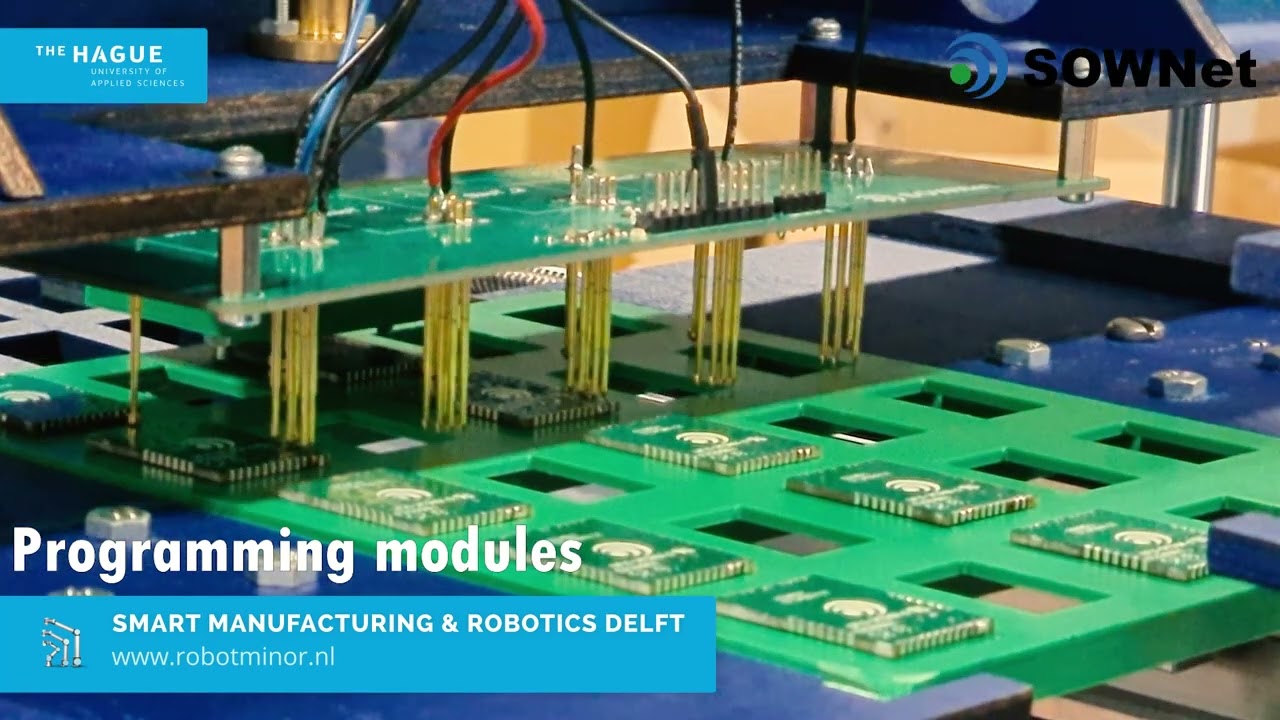
linkedin Jaap Knook : https://www.linkedin.com/in/jaap-knook-a8ba2b157/ René van Rijswijk : https://www.linkedin.com/in/ren%C3%A9-van-rijswijk-b79a0b170/ Tim Kuppens : https://www.linkedin.com/in/tim-kuppens-420798178/ Coen van Marrewijk : https://www.linkedin.com/in/coen-van-marrewijk-494886183/ Introduction VDL TBP electronics is a company that is specialized in the manufacturing of small …
Students: Ian de Boom, Matthijs Kenis, Zeynel Koca (2021)

Students: Rwan Fawzy, Mathijs Frank, Pascal Christiaanse and Rick Vermeer. (2021)

Students: Daniel Tacoma: Daniel Tacoma | LinkedIn Jelle van Haaster: Jelle van Haaster | LinkedIn Arjan van der Knaap: Arjan Van Der Knaap | LinkedIn Maarten …

There is no excerpt because this is a protected post.
The problem at hand Background Royal Van Eerd is a Dutch company, which produces packaging boxes for the pharmaceutical industry. The company prints, die-cuts, folds and glues carton packaging for …

Students: Rasmus Roovers, Maup Heijke, Geran Stortelers, Jeroen Osse & Robin Lotgering

Teaser video Vokerrail – SMR Volkerrail uitleg video – SMR Introduction: As part of the minor smart manufacturing & robotics, we had to complete an assignment from Volkerrail in …

Students: Saskia de Wit and Pedram Kiai

Introduction Due to COVID-19 restrictions our initial project had to be cancelled, because we no longer had access to the industrial robot. Therefore, we came up with the following project. …
[This assignment is part of Siemens’ greater project to automate twistlock handling. Due to the COVID-19 related lockdown this project assignment and the solution have been adapted to working from home, without a physical robot] INTRODUCTION In …
Students: Bas Holweg, Mike van Steekelenburg & Hans Verstraeten 1.1. Introduction Promolding is a company specialized in producing high performance polymer products. One of the products it produces is a …

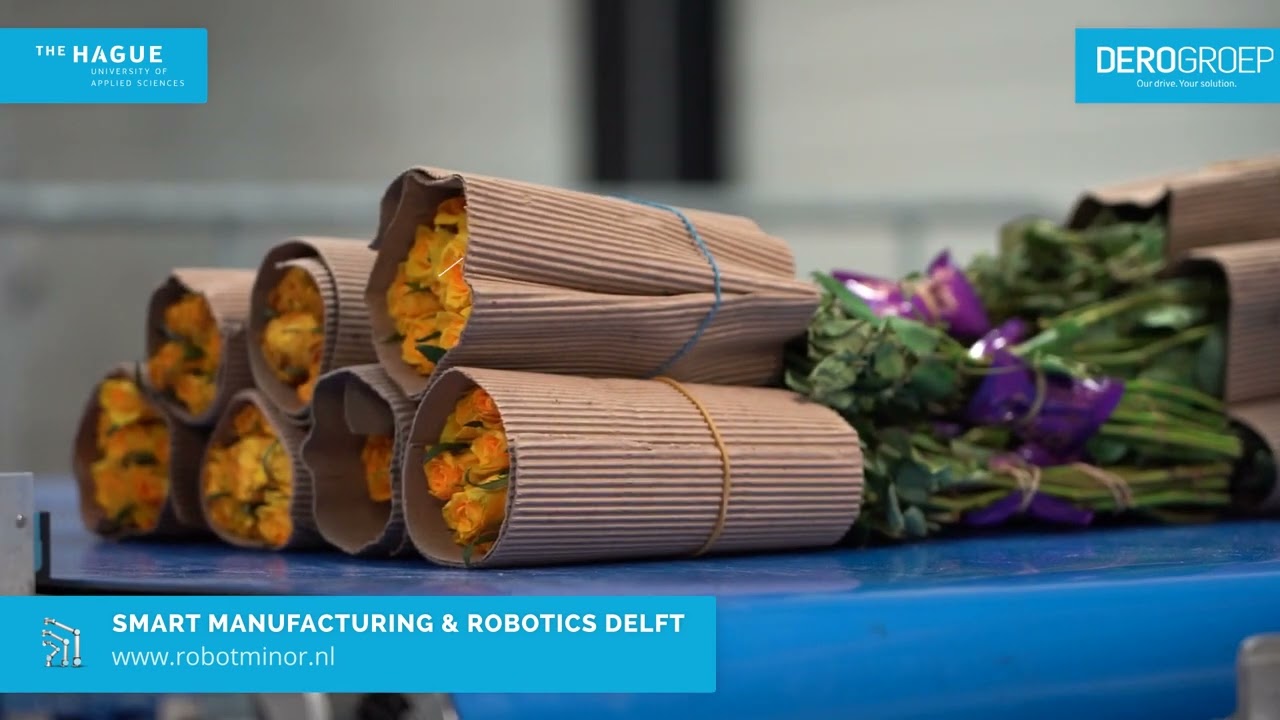
Groepsleden: Linkedin Dave Ravensbergen Linkedin Mark de Roos Linkedin Martijn Venselaar Linkedin Guus Zwart Original Situation DERO is a company that designs, produces and installs automated processes. They got contacted …
Michael Liendo, Pieter van Veen. (2021)
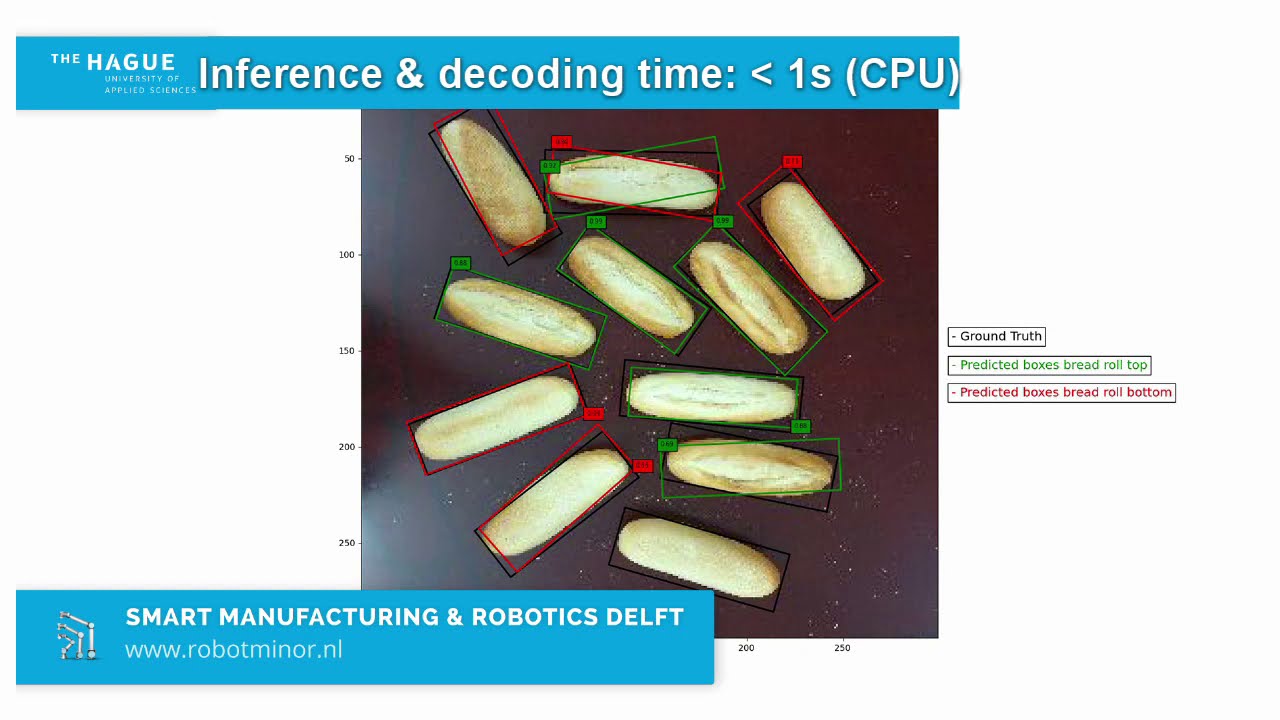
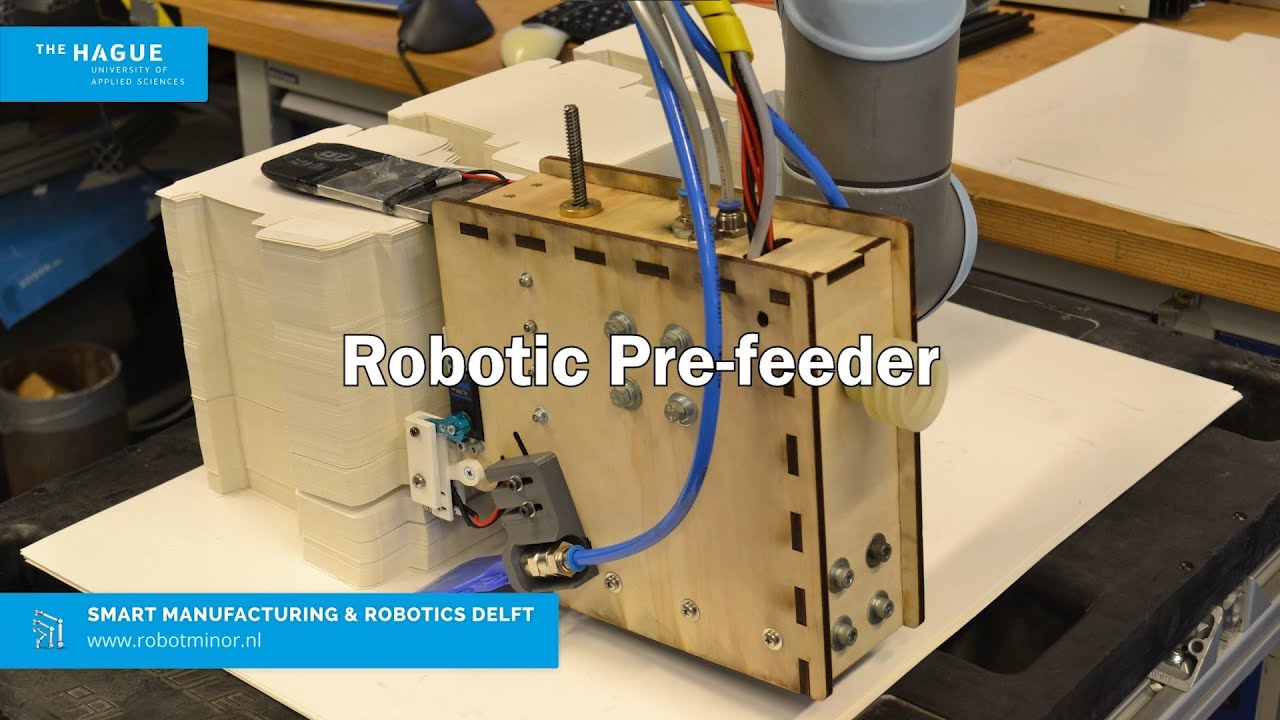
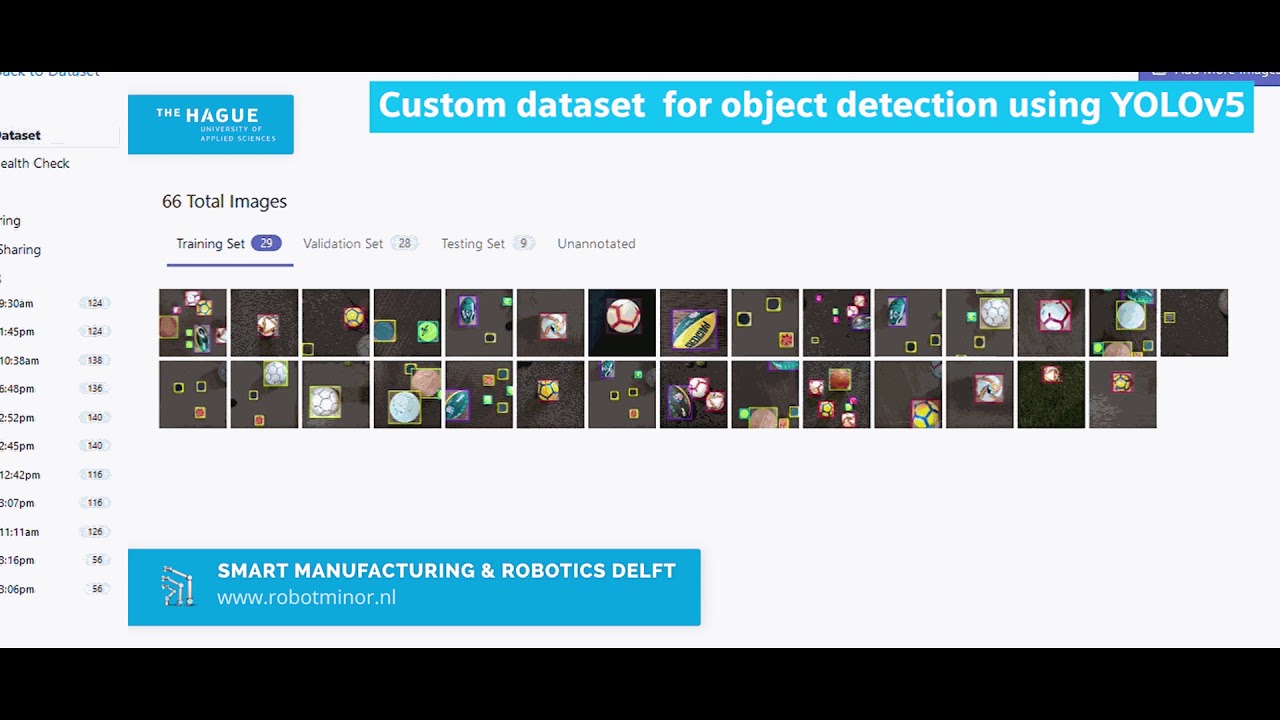
Elmer Russchen, Jaime Cobos. (2021) Google Colab notebook GitHub repository The problem The original project for DERO was to pick a variety of types of bread out of a crate …
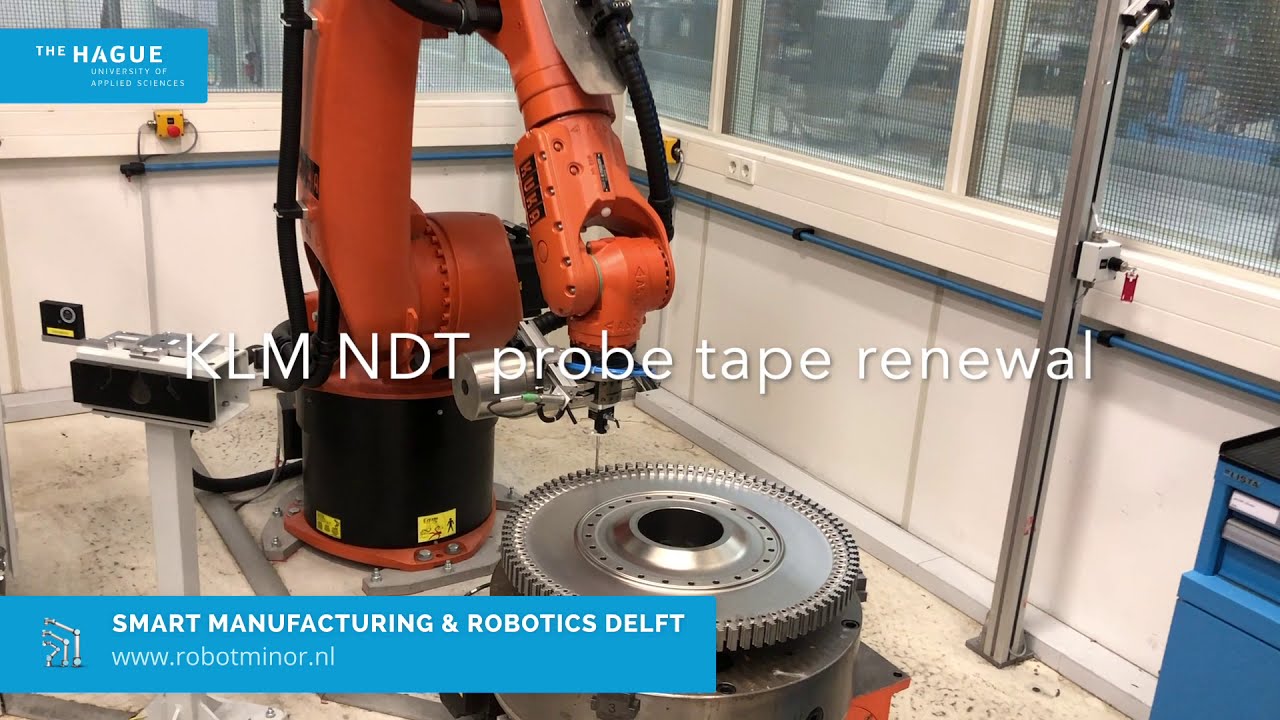
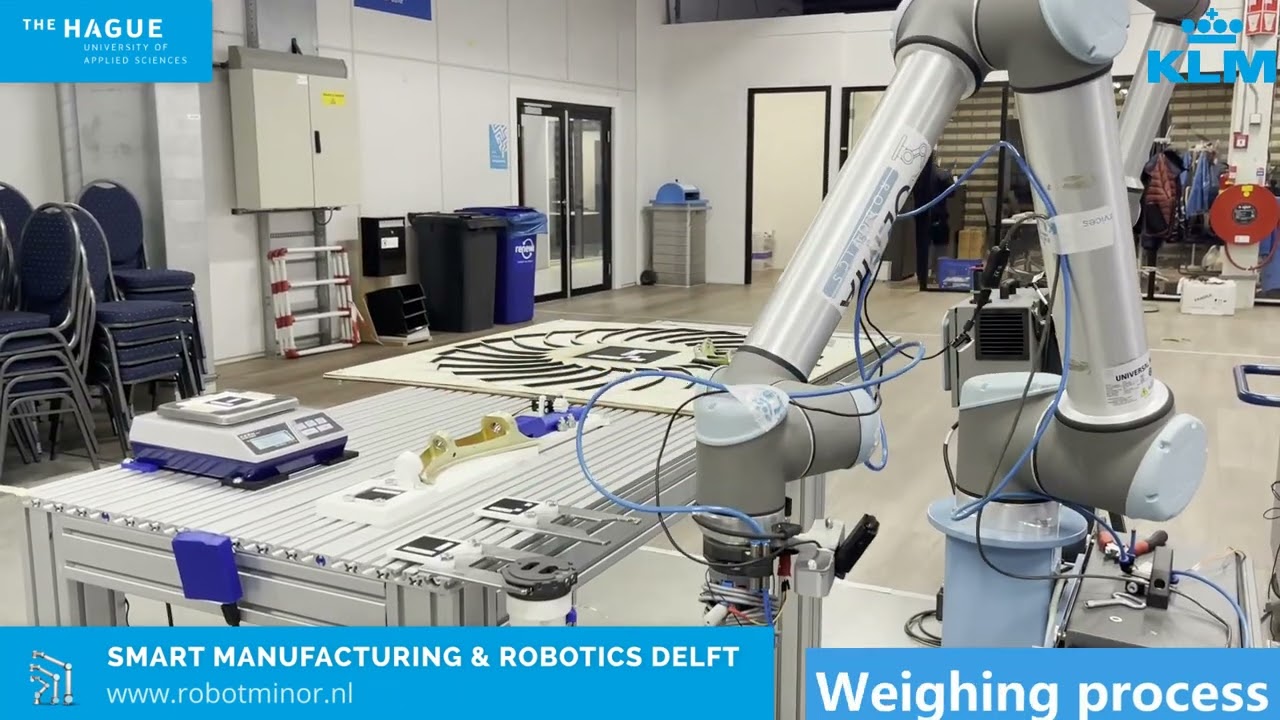
Linkedin Koen Geers: https://www.linkedin.com/in/koen-geer… Linkedin Barry Damen: https://www.linkedin.com/in/barry-dam… Linkedin Stan Vijverberg: https://www.linkedin.com/in/stan-vijv… Linkedin Lex Verheij: https://www.linkedin.com/in/lex-verheij-042035205/ The original situation KLM engine service performs quality checks on HTP disks from aeroplanes. These …

Smart Robotics & Manufacturing – Haagse Hogeschool – Semester 1 By Pedram Kiai, Sander Boelen, Wouter Drost & Kika Jonker INTRODUCTION Metagro, part of Dubbeldam group, specializes in the …
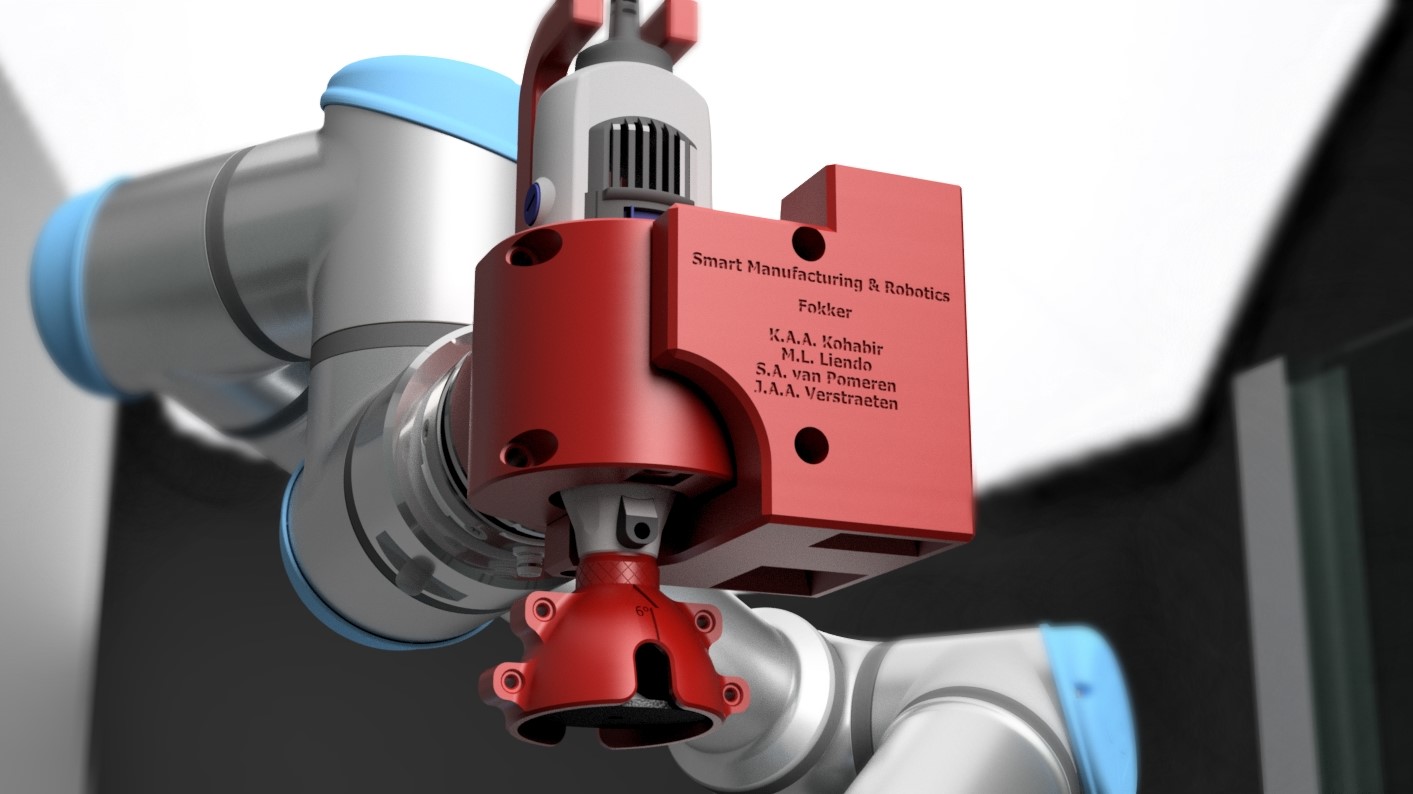
Students: K.A.A. Kohabir, M.L. Liendo, S.A. van Pomeren, J.A.A. Verstraeten

SolarSorter3000, Let’s sort it out! “We did it. We built a single purpose robot within 8 weeks”. The project team worked on a SMR project commissioned for GTM. SMR, …
Students: Bas Holweg, Dave Ravensbergen, Mike van Steekelenburg, Saskia de Wit
Students: Jaime Cobos, Pieter van Veen, Stan Vijverberg, Manuel Vogels. (2020)
Students: Mark de Roos, Elmer Russchen, Martijn Venselaar, Guus Zwart
Barry, Koen

Students: Sven den Exter, Stefan Ammerlaan and Thijs de Knegt

Go Pro glider introduction My goal was to move a Go Pro certain distances a bit smoother than walking. The result is not entirely what I was going for. But …

Students: Jordy Ubink & João Rocha MagicMirror Module for displaying Discourse notifications Introduction We made a module (plug-in) for the MagicMirror (see it here). That is a smart mirror, driven …
Student: Matthijs Brand (2020)
Students: Roel van der Plas and Bart van Veggel
by Es-saidi Shaima INTRODUCTION Given the exceptional circumstances that is currently hitting the world, the minor smart manufacturing and robotics was transformed into an online project. Initially, a minor …
Student: Laurens Roos Introduction In order to enable remote robotics education, the Workshop Universal at the Hague University of Applied sciences contacted us to build and design a robot that …
By: Jere Korpela
Robust internet services node By: Alejandro Colomar Andrés Introduction Companies depend on servers to provide their services on-line, and ideally those servers should be running 24/7 (all the time). However, …
Students: Jordy Ubink, Laurens Roos
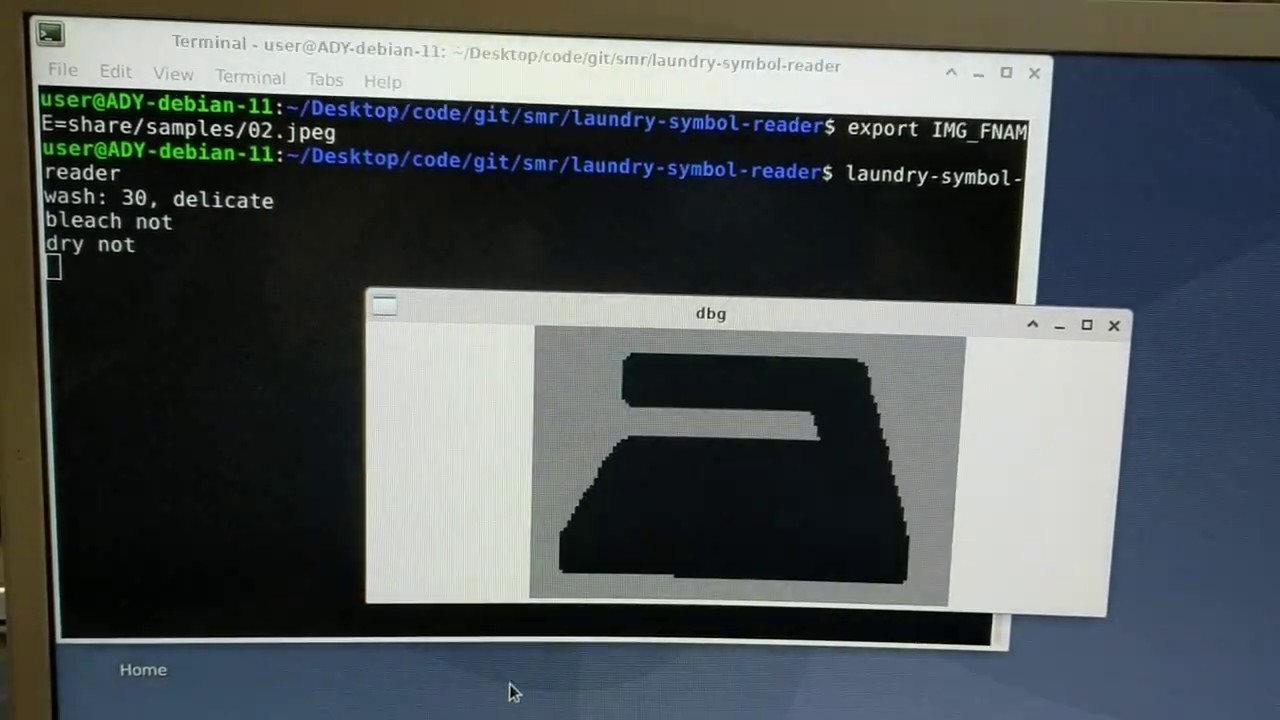
Laundry symbol reader By: Alejandro Colomar Andrés & Tim Splinter Introduction Most of us don’t know what those symbols in our clothes’ labels mean. Some of us can know some …

Students: Bart van Veggel, Matthijs Brand, Roel van der Plas, Tim Splinter. (2020)
Students_spring_2020 : Es-saïdi Shaïma and Rocha João Introduction The year 2020 has been shattered by the coronavirus. The Hague University of Applied Sciences has closed its doors for the spring …

By Tim van der Meijden, Lombard de Leeuw and Joost Schoonhoven

Students: Wesley Damen, Martin van Langevelde, Wouter Lettinga & Youri Verschut (2020)
Students: Luke van der Burg, David van Dijk, Frits Hoogendijk, Joris Kortekaas, Thijs Kortekaas
Joeri Vos, Antti Inkinen, Johan de Geus

Students: David van Dijk, Khanh Nguyen Duy, Wesley Damen & Youri Verschut. (2019)
Antti Inkinen, Carlo de Beer, Johan de Geus, Marc Dudley

Luke van der Burg, Joris Kortekaas, Martin van Langevelde en Wouter Lettinga
Students: Laurens Gosseling, Marcel Koop, Frits Hoogendijk. (2019)
Students: Tim van der Meijden, Lombard de leeuw, dennis van den berg, joeri vos.

Students: Reinout Keulen, Thijs Kortekaas and Joost Schoonhoven (Fall 2019)
Students: Christian Floris, Sammes de Haan, Melissa Damstra (2019).
Students: Martijn Bakker, Rutger Peeters, Casper van Ravels, Lisan Siemonsma.
students: Casper van Ravels, Mark de Vries, Zander van der Steege, Martijn Bakker
Students: Alexander Burgers, Chris Floris, Sammes de Haan and Lisan Siemonsma (2019)
Students: Melissa Damstra, Rutger Peeters, Jonathan van de Reep, Frank Reszka (2019).

Students: Hanno van Megchelen | Sanne Thepass | Jeremy Tiebosch | Rick van den Eng | Jefta Hofstede
Students: Roshan Gangapersad, Roy Osephius, Mick Remmerswaal, Alex van de Vliert
About the company “Assemblage perfect” is a local workshop in Duiven, a small town next to Arnhem, run by mr. Peter de Dreu. In this workshop they do various engineering …
Students: Lars Gottschalk | Tom Hoogerwaard | Stefan van der Lee | Jordi van der Plas Introduction Johma is a food producing company specialised in making salads. They produce all different …

Students: Bart van Leeuwen | Tom Rozekrans | Ishvara Lalta| Bart de Langen Bin Packing problem A very old and known problem in the logistics industrie is the bin packing …
Students: Alex van de Vliert, Berend-Jan Slobbe & Mick Remmerswaal

Students: Jefta Hofstede | Tom Hoogerwaard | Hanno van Megchelen | Sanne Thepass

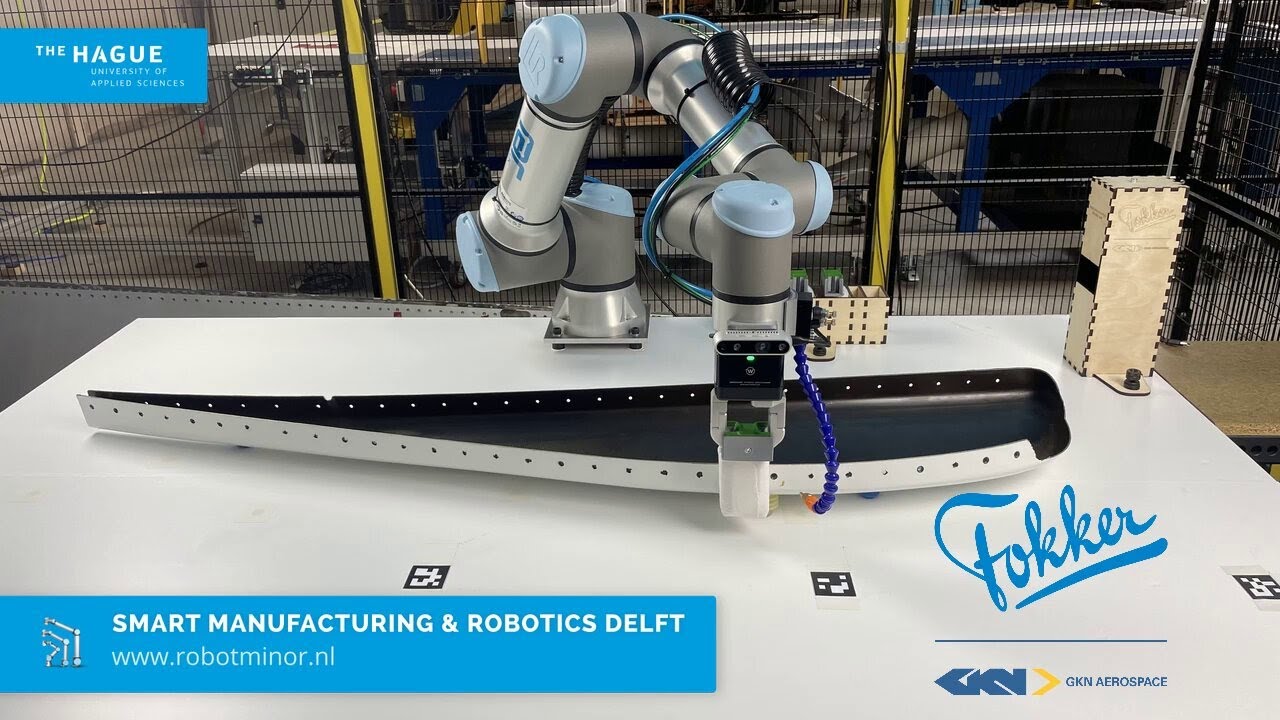
Students: Ishvara Lalta | Talha Erbilli | Stefan van der Lee | Rick van den Eng Fokker Aerostructures is a subsidiary GKN Aerospace and is specialised in the design, development and …
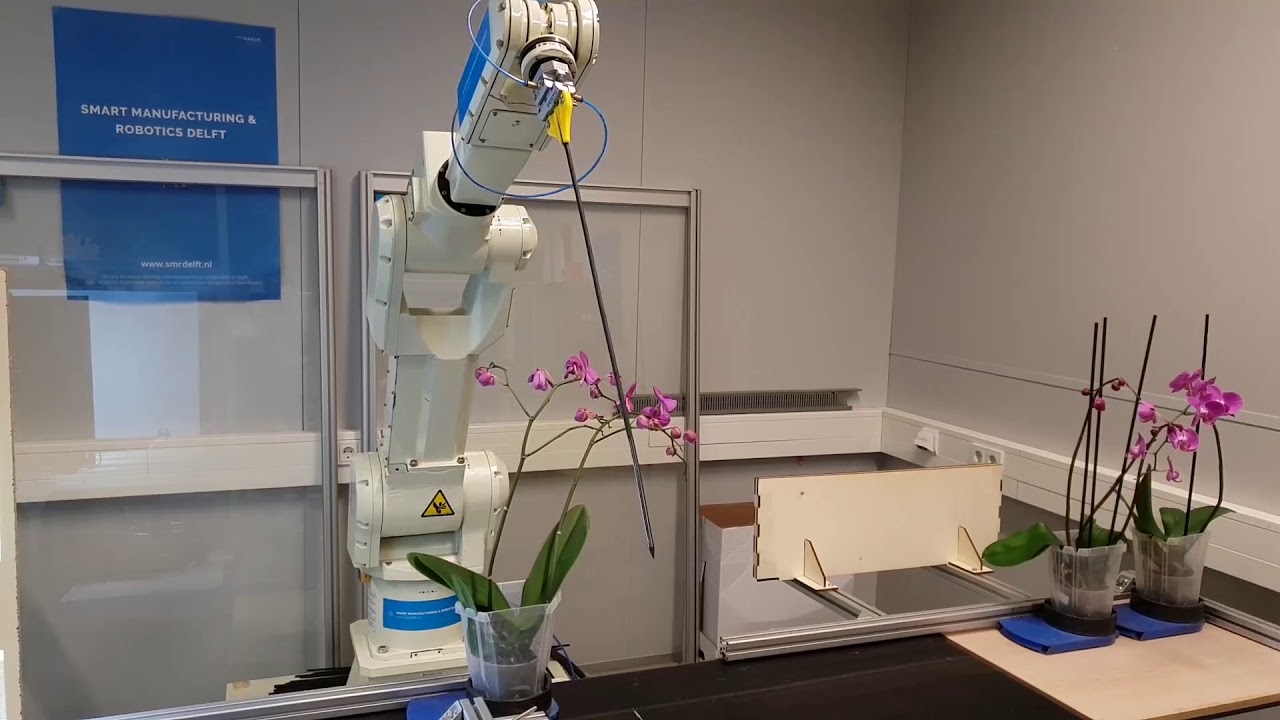
Students: Bart van Leeuwen | Tom Rozekrans | Jordi van der Plas | Maarten van Bakel Ter Laak orchids Ter Laak Orchids was founded in 1954 and is currently being …

Students: Bart de Langen, Jeremy Tiebosch, Roy Osephius, Hidde van Kleij

Introduction At the company of Cêlavita McCain they produce fresh packings of potatoes in all kind of different sizes and tastes. They have a factory in Wezep that is divided …

Werkse! is a company that offers supported employment to people with physical and/or mental learning difficulties, to enhance their future job prospects. Werkse offer a number of services, positions …

Students: Maurice van Beijnen, Céleste Brommer, William Nuijt, Menno van Rooijen Introduction KVE Composites Group is a company specialized in composites. They mainly serve the aerospace, defence and machine construction industries. …

Students: Roel op ‘t Hoog, Theo Tromp, Jorge Luis Díaz Onofre, Florens Vernooij
Students: Alvin Dumaij, Jon Diaz, Sander Hemmes, Jan Tromp

Project by: Stephen Frame, Bauke Hendriks, Maurice Van Beijnen, Milad Habibi, Mitchel Mulder. Introduction Our project is from Hazeu, a local company in Delft that grows and sells a variety …

Zwethlande Zwethlande is a grower of Ficus plants. They have over 30 years of experience with this type of plant, which explains their expertise. At some point they decided to …
Students: Pepijn van Eck, Yuk Ho Chung, Schelte van der Horst, Jorge Luis Díaz Onofre, Florens Vernooij Images 1 through 4: Logos of Fokker Technologies, The Hague University of Applied Sciences, University …
Students: Céleste Brommer, Sander Hemmes, Jan Tromp, Theo Tromp .

Students: Alvin Dumaij, Martijn Keijzer, William Nuijt, Jon Diaz Introduction Rexnord is a company specialized in the production and assembly of conveyor belts. They produce conveyor tracks and the components …

Project by: Joost Kingma, Sander van Gemmert, Ka Chun Tsang and Mark van Leeuwen Introduction Hoogeveen Plants is a horticulture company that specialize in Climbers, Fruit Plants, Bamboo-Grasses-Ferns and Helleborus. …
Today, more and more assembly processes are being automated by robots. If well designed, they provide excellent precision and repeatability without getting tired. However, one of the main issues with …

RAMLAB (Rotterdam additive manufacturing lab) is a researchcenter in the port of Rotterdam. It’s main focus is to develop WAAM (Wire Arc Additive Manufacturing) for the industry. WAAM is proces …

DAF Trucks is the biggest manufacturer of trucks in the Netherlands. DAF trucks is located in Eindhoven with a work area of 900.000 m2. In the year 2016 they …

The Composite Automation Development Centre (CADC) of the Delft University of Technology, is trying to bring more smart automation in the composite manufacturing- and processing industry. This project is executed …

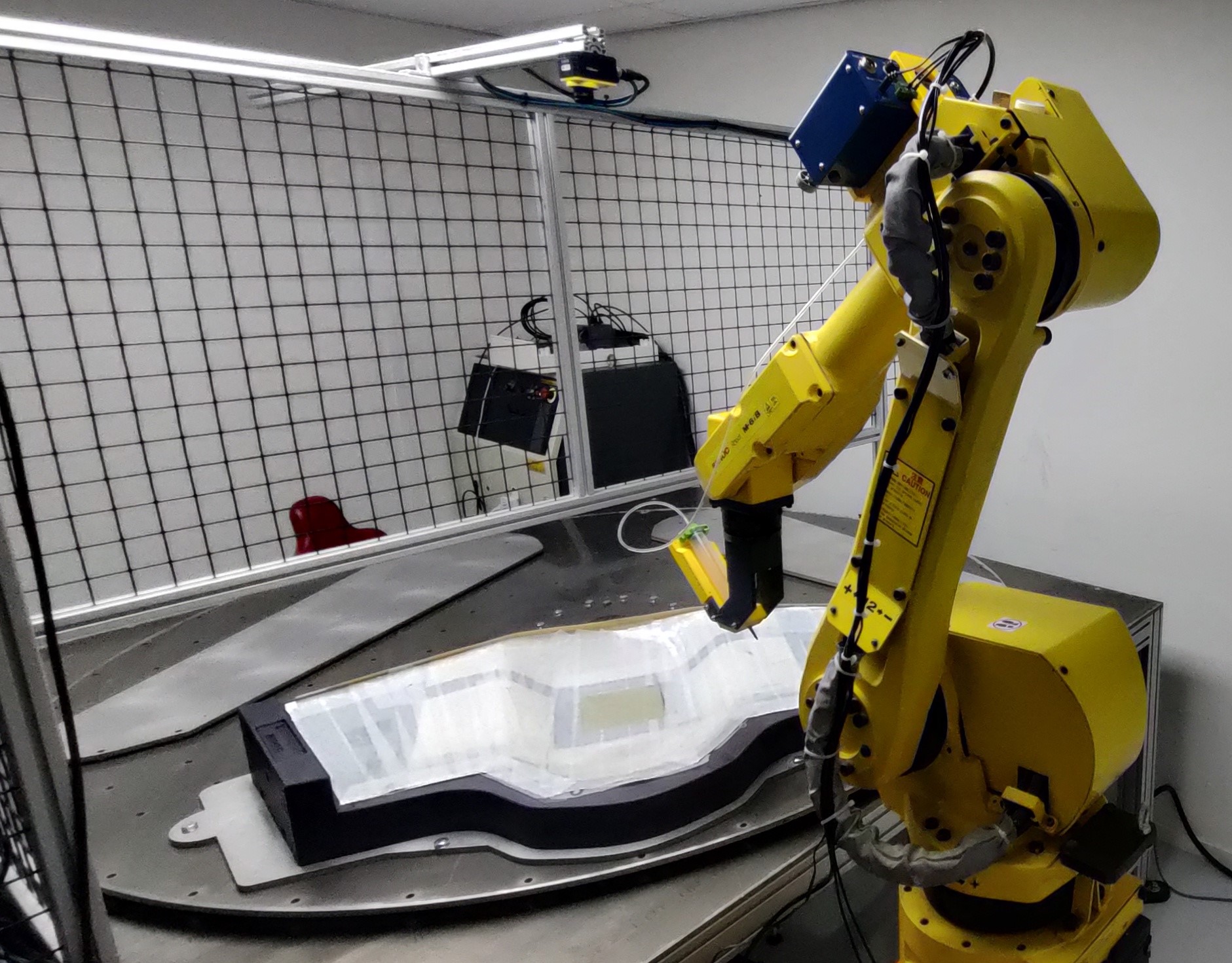
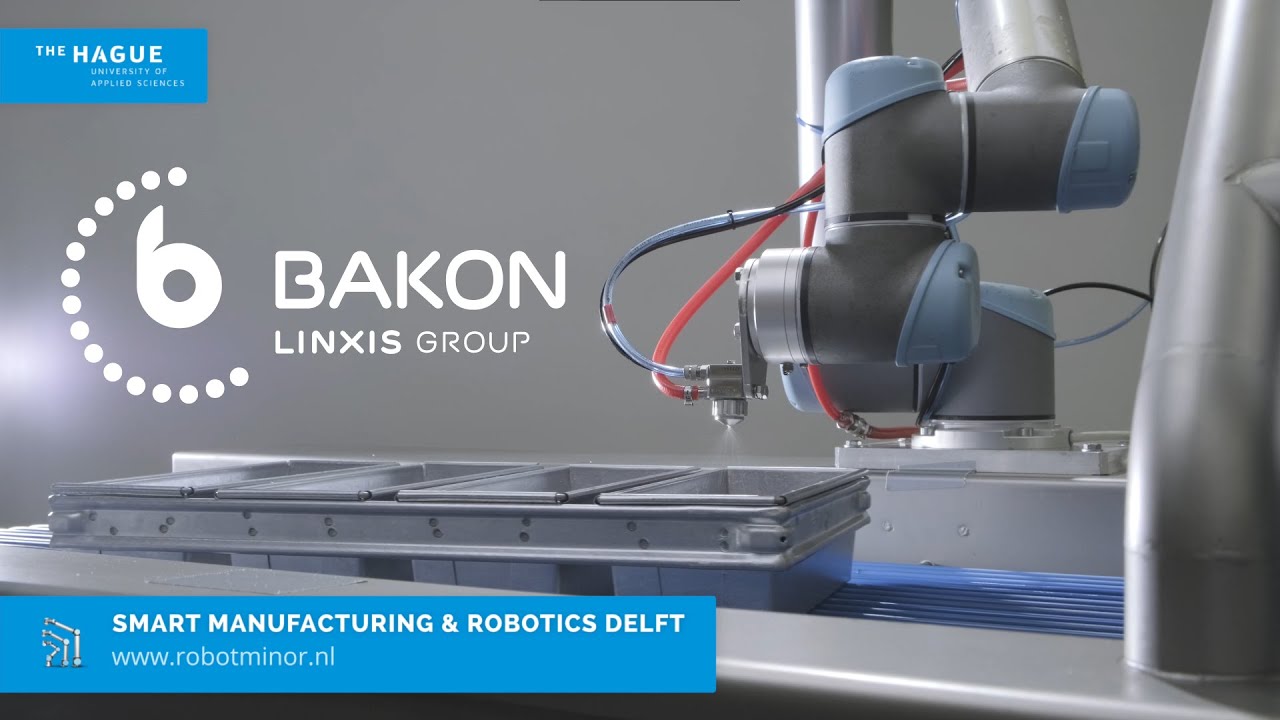
Assignment Our client asked us to create a demo for automatically applying sealant to a soldered object and a ceramic object. This is to ensure the soldered object does …

Vink Systemen Working in clean air. Producing in an optimum climate. Vink Systemen designs, supplies, installs and maintains your custom air distribution system. A reliable partner in many markets for …

Viscon group The Viscon Group is passionate about creating innovative, solid and smart logistic solutions for all handling processes in Food and Agro businesses. The Viscon DNA consists of asking many …

Introduction Zwethlande: Plantation Zwethlande has 30 years of experience in the growing of Ficus pot plants. Because of these years of experience in this field, the company is famous for …

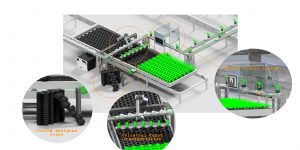
Artechno Automatic Seeding Line Artechno is a innovative company offering automation solutions for horticulture. One of their ongoing projects is to create a fully automated vertical farm that can be …

Introduction Rijkzwaan is a company that develops new varieties of vegetables and is a supplier of seeds. The head office is located at De Lier, but because of their …

Airborne envisages the future where the composite industry has grown and matured, offering products and services to a greater amount of markets and applications. The vision of Airborne is to …

Students: Thijs Bril, Sander van Gemmert, Stijn Paardekooper, Martijn Peterse (Fall 2017)

Students: Jesper Tjauw-A-Hing, Remt Bertz, Erwin Damman, Ka-Chun Tsang (Fall 2017)

Video Introduction PeterKouwenhoven is a company that is active in floriculture. They grow six different varieties of Anthuriums that are meant for the flower auction. This is done in a …

One of the biggest breweries worldwide contains approximately 550 employees at the Zoeterwoude brewery located in the Netherlands. HEINEKEN strains after a high-quality production flow where fully automation is desired. …

Students: Gerben van Dijk, Mike van Amsterdam, Tiemen Markerink & Arian Duine (Spring 2017)

Students: Alexander Ramp, Wouter van Leeuwen, Guus Figdor, Willem van der Linden, Sjoerd Kaptein & Marc Groeneveld. (Spring 2017) Introduction “Industrial spare parts should always be available wherever they’re needed, …

Students: Berkay Sevinc, Ben Williamson, Gerben van Dijk (2017)

-The team: Loris van der Voort, Tim Jansen, Walter Heemskerk, Willem van der Linden -In collaboration with:

Students: Mike van Amsterdam – Wouter van Leeuwen – Alexander Ramp

Students: Elon Hendriksen, Tiemen Markerink, Guus Fidgor, Arian Duine. (2017)

Students: Sjoerd Kaptein, Koen Mourits, Marc Groeneveld. (2017)
Students: Jan Gerryt de Haan, Coen Overvliet, Rick van Kesteren, Veysel Köse. (2016-2017)

Introduction Composite materials, which are made from high-tech fibers and resins deliver unique mechanical performances. These materials distinguish themselves by their high stiffness and strength with excellent thermal stability and …

Airborne The client of the project group is Airborne, which is a company that provides composite solutions/services to aerospace, maritime and automation problems. The main function of airborne is to …
Students: Erik Donkersloot – Mark van der Lee – Stephan de Reus – Matthias van Zweeden For questions please contact us at: adaptivelaserinspection@gmail.com Project description The SMR minor focuses …

Students: Sander Bal – Simon Navarro – Simon Boerwinkel – Marc Ziedses des Plantes MUD Jeans Denim recycling and circular economy MUD Jeans is a fashion brand company, …
Students: Jan Gerryt de Haan, Coen Overvliet, Rick van Kesteren, Veysel Köse. (2016)

Authors: Thomas van Mil, Steven Vijverberg, Barry van Leeuwen en Marwin Bokkers
BIT Hotmelt Technology & gluing mattresses Over seven billion people populate Earth and there are even more mattresses. Many of these mattresses are glued together, To produce this amount …

Scindapsus Students: Jelle van Leeuwen, Stephan de Reus, Irene Stolk, Stef Nibbelink.

Students: Sander Bal – Simon Navarro – Simon Boerwinkel – Marc Ziedses des Plantes automatedpincher@gmail.com Pot Chrysanthemum and the gebr. Nederpel In Europe, we love the chrysanthemum, but not only …
Students: Niels Westerduin, Mark van der Lee, Matthias van Zweeden, Erik Donkersloot For questions please contact us: applebinpicking@gmail.com

Pascal van der Krogt, Hugo Vader, Peter Verweij, Victor Reinders (Spring 2016)
Team members: Bram van Riessen, Guus Paris (2016)

Students: Rowan Overdevest, Laurens Kok, Dave van den Berg, Jordy Rosbergen and Alex Lorier.

Team members: Rowan Overdevest, Guus Paris, Bram van Riessen (2016)

Students: Peter Verweij, Pascal van der Krogt, Hugo Vader & Alex Lorier. (Spring 2016)
Students: Ariel Atenco, Jordy Rosbergen, Abhishek Chudal, Victor Reinders (2016)
Students: Siebe van den Berg, Anthony Luzac, Pascal de Vilder and Marieke Bakker (2015)

Students: Mathijs van der Vegt, Thijs Franssen, Gerben Taanman, Rick den Ouden. (2015)
Students: Marc Cornet, Sjors van Leeuwen, Hans Gerritsen, Justin-Bryan Gross, Martijn van Paassen. (2015)

(2015)